用C51单片机设计物体分级设备的测量光幕
1 引言
光幕是电子测量系统中应用比较多的一种设备。利用光幕可以测量恒速传送带上的物体高度、长度或宽度等一系列数据,以便为后面的电子系统提供相应的参数。本文给出了一种利用单片机实现物体高度测量的光幕测量方法。
2 光幕测量物体高度的基本原理
图1所示是一个用普通光幕测量物体高度的测试原理结构示意图。图中,光幕的一边等间距安装有多个红外发射管,另一边相应的有相同数量同样排列的红外接收管,每一个红外发射管都对应有一个相应的红外接收管,且安装在同一条直线上。当同一条直线上的红外发射管、红外接收管之间没有障碍物时,红外发射管发出的调制信号(光信号)能顺利到达红外接收管。红外接收管接收到调制信号后,相应的电路输出低电平,而在有障碍物的情况下,红外发射管发出的调制信号(光信号)不能顺利到达红外接收管,这时该红外接收管接收不到调制信号,相应的电路输出为高电平。当光幕中没有物体通过时,所有红外发射管发出的调制信号(光信号)都能顺利到达另一侧的相应红外接收管,从而使内部电路全部输出低电平。这样,通过对内部电路状态进行分析就可以得出物体的高度信息。由于上下相邻光路可能会相互干扰,因此,选取的红外发光管的发射角度要小于15°,此外,考虑到光幕要有一定的宽度,因而还应对红外发射管发出的信号进行调制。但在实际制作中,上下两路总存在干扰,很难提高测量精度。为了彻底从根本上解决相邻两路的干扰问题,本文给出了一种用C51单片机及相关芯片来实现高度测量的方法。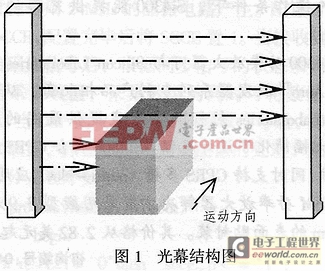
3 高度测量光幕系统结构及工作过程
高度测量光幕的系统结构如图2所示。器件的红外发射和接收通路数目理论上最大可有215个,考虑到实际光幕的高度和上下通路之间的间距,一般不会超过64个。为方便介绍,本文以通路数16为例,且按安装的高度从高到低依次标为1路、2路、3路。……16路。发射和接收部分的多路选择开关选用常见的多路选择器(如7LS15系列)。发送端的多路选择器的A0~A3接单片机的P1.0~P1.3,接收端的多路选择器的A0~A3接单片机的P1.4~P1.7,并入串出模块和串入并出模块选用8位移位寄存器(如74lLS165和74HC595)。并入串出模块的装载信号Ld=P1.4·WR? 串入并出模块的数据读出信号 E =P1.5·RD。移位控制信号端接TE同步信号。RAM用来存储数据,可将其接在单片机的P0和P2口上。其容量的大小视处理的数据量的多少而定。本文选择1kB。同步信号TE和移位时钟CP可用单片机的定时器产生,也可用CP时钟8分频来作为TE信号。对串入并出模块的读和对并入串出模块的写均可通过中断方式来完成。同时?用单片机的串口可将处理后的高度数据送出。直线扫描模式下,器件的工作流程如下:首先单片机在TE的下降沿到来后,向串入并出模块写入要发送的数据?如01H?,并同时向发送端和接收端送出相同的通路选择信号?即第一路地址信号?。而当TE的上升沿到来时,在移位时钟的控制下?数据01H开始经多路开关被送到第1路的红外发射电路,再经调制后以光信号形式发出,与此同时?红外接收电路在TE上升沿到来时开始启动接收。由于发送和接收的多路开关选择信号相同,因此,实际上只有与发射端相对应的一路(即第一路)才被接收。经解调后的数据一般可在移位时钟的作用下被移入串入并出模块,并在TE下降沿到来时接收完毕,同时触发单片机的中断处理程序,使数据被单片机读走。单片机再对发出的数据和接收到的数据进行比较,若不同?注:这里只有在该通路中有物体阻挡时,才接收不到发送信号,致使发送和接收的数据不同),则表明该路有物体通过。若相同则表示该通路中没有物体阻挡或者是物体高度比该路红外发射管安装高度要低。接着扫描第2路,同时单片机在TE下降沿到来后,送出第二路的选择地址,并送出要发送的数据(本文用02H?也可不同)。同样,在TE上升沿到来时开始移出,并通过第二路发送和接收通道,再经调制后以光信号形式发出。与此同时,TE的上升沿启动第二路接收。接收完毕后,单片机进行相关的处理。接着是第三路、第四路、……第十五路、第十六路,从而完成一次从第一路到第十六路的扫描。若要求以100次/s的速度进行扫描,则TE的频率应当是1.6kHz,而移位时钟CP的频率应当是12.8kHz。发送和接收的时序如图3所示。图中,RN是接收到的串行数据,TN是发送端移出的数据。图中略
- 基于单片机的智能计步器设计(09-20)
- C51单片机微调SH-20504程序(12-02)
- C51单片机运用定时器T0中断实现电子时钟(12-02)
- T6963C的51单片机驱动程序(12-02)
- 89C51单片机I/O口模拟串行通信的实现方法(11-30)
- 基于stc51单片机的光立方c语言源代码(11-30)