基于单片机与旋转编码器的闭环线速度控制系统
在电缆生产线上,通常需要检测电缆的走线速度,用来控制收线电机的转速和计算线缆的长度。成缆工艺参数的稳定,直接关系到
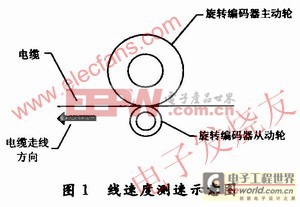
该项目中,采用的旋转编码器的型号是TRDJ1000系列,旋转一周输出1 000个脉冲。因此,根据在一定时间内检测到的脉冲数,就可以计算出电缆的走线速度。实际应用中,将其与一加工精度极高、周长为500 mm的旋转编码器测量主动轮与旋转编码器同轴安装,主动轮与电缆接触。在电缆生产运动过程中,依靠摩擦力拉动测量轮旋转,这样就把电缆的直线位移(长度)转化为旋转编码器的脉冲数字信号输出。
设旋转编码器每旋转一周,其计数脉冲个数为NP(脉冲个数/转),则旋转编码器角分辨率(单位:(°)/个)为:
P=360/NP
假定固定在旋转编码器转轴上的主动导向轮半径为r m,则旋转编码器位移分辨率(单位:m/个)为:
Ps=27πr/NP
这时,若计数脉冲个数为N(个),则由旋转编码器测量的位移量S(单位:m)为:
S=Ps·N
线缆走线速度V(单位:m/s)为:
V=S/T
式中:T为接收N个脉冲所用的时间(单位:s)。
2 硬件电路设计原理
该检测电路以AT89C51单片机为控制核心,如图2所示,旋转编码器输出的脉冲,经过电平转换,变成O~5 V的TTL电平脉冲,送到AT89 C51单片机的外部中断INT0端。每收到一个脉冲,单片机中断一次,同时计数脉冲存储器加1,与标准脉冲值比较后,单片机的P0口输出给定值数字量,再经过D/A转换变成给定值模拟量,送给收线电机调速器,控制电机转速。这里的D/A转换芯片采用8位数据输入,四路模拟量输出的TLC7226IDW。如果需要提高电机转速控制精度,可以选用其他10位、12位数据输入的D/A转换芯片。
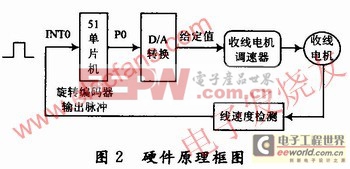
工作时,当收线电机带动电缆运动时,带动旋转编码器的主动轮旋转,从而旋转编码器旋转,输出脉冲。该脉冲送入光电耦合器,进行隔离、整形、电平转换,送给AT89C51的12脚,外部中断INTO进行脉冲计数。每接收到一个脉冲,单片机执行外部中断INT0子程序一次,脉冲计数存储器加1。例如,每间隔1 s读取一次,从而可以根据计数脉冲的个数,与标准脉冲数比较,因此,可以判断当前线速度的大小。
线速度的计算方法如下:
例如,要求线速度V为0.1 m/s。
旋转编码器每秒输出脉冲数=V·Np/C
其中:C为旋转编码器主动轮周长(单位:m)。所以,线速度为O.1 m/s时,旋转编码器每秒输出标准脉冲数=0.1×1000/0.5=200个/s。
3 软件设计
在定时器中断中运行,在计时子程序中,每秒执行一次。即查询每秒收到的脉冲数是否与标准脉冲相同。该线速度控制子程序如图3所示。
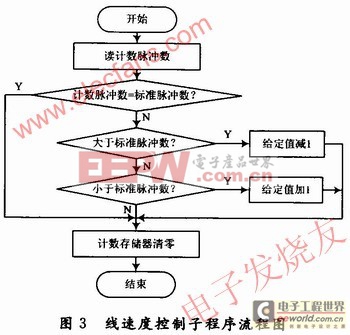
首先,读脉冲计数存储器的数值,与标准脉冲数比较,等于标准脉冲,脉冲计数存储器数值清零,说明此时走线速度等于标准速度;若大于标准脉冲数,说明线速度大于标准线速度,因此,必须使调速器给定值减1,使得收线电机转速减低;若小于标准脉冲数,说明线速度小于标准线速度,必须使调速器给定值加1,使得收线电机转速增加,从而形成闭环线速度控制反馈系统,控制收线电机旋转速度,使得线速度保持恒定。
4 结语
根据电缆成缆机的工艺要求,设计了单片机与旋转编码器组成的闭环线速度控制系统,并给出了主要控制程序的设计方法。还可以通过软件实现线缆走线长度的检测以及运行时间的计算等功能,并通过显示屏显示出来。上述线速度控制系统已成功应用在实际的技术改造中,为企业节约了近百万元的技术改造资金。结果表明,该系统具有运行稳定可靠、电路简单、测量精度较高、成本低等特点,完全满足电缆生产工艺要求,其简洁的电路设计和典型的控制方法具有较高的参考价值。
单片机 51单片机 MCU 单片机视频教程 单片机开发 ARM单片机 AVR单片机 PIC单片机 Atmel stm32 单片机学习 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)