基于51单片机控制的自动停车收费管理系统
0 引言
随着经济的增长,越来越多的人加入了购车行列。汽车数量的剧增和停车场地的相对短缺,使得停车场的管理收费问题凸现。特别是大型超市的临时停车场管理收费更加困难。
1 现有停车场收费管理系统
目前的停车场收费管理系统通常采用以下两种计费方式:
(1)摄像计费方式:在停车场出入口分别放置一台摄像机,通过摄像机摄下汽车车牌号码,送单片机或者电脑处理。再通过单片机计算停车时间和费用,并控制大门开启。该方案信息量大,要求具有较大的存储容量。软件设计复杂,成本高。
(2)刷卡计费方式:车主到指定地点办理IC卡,通过打卡进出停车场,并通过IC卡缴费。但该方式更适合于有长期固定停放车位的停车场。
为了解决上述传统计费方式的不足,笔者设计了一款基于89C51单片机的临时停车场自动停车收费管理系统。本系统采用红外线检测单片机计费方式,所需存储容量小,具备了自动开启关闭大门功能、自动计费功能、显示功能(显示停车场状况)、查询功能和打印功能,而且收费方式可以调节,使系统更具灵活性。整个系统操作简单、价格低廉、安装调试方便。能够满足管理临时停车场的要求。此外,该系统还可以方便地实现信息加密和各种功能扩展,通过改进可成为通用型收费管理系统。
2 系统框架与工作流程
2.1系统框架
按功能划分。本临时停车场收费管理系统分为7大模块,如图1所示。

图1临时停车场自动停车收费管理系统框图
(1)红外线检测模块:安装在车场出入口以及每个停车位上,用于检测汽车的进出车场大门和停车位信号.送单片机作相应处理。红外线检测模块由红外线发射电路和红外线接收电路组成。其中接收电路又分为大门红外线接收电路和停车位红外线接收电路。
(2)大门控制模块:与红外线检测模块协作,执行停车场大门的开闭功能。
(3)单片机控制中心:采用89C51单片机系统,它是本系统的核心部分,主要功能是监控键盘状态.处理键盘输入的操作信息;监控停车场状态,控制大门开闭,有车驶入停车位后开始计时,汽车驶出停车位后停止计时,将停车时间换算为停车费用信息;控制显示器按要求显示各种信息;控制信息的打印过程。
(4)停车场状态显示模块:显示停车场状态信号。黄灯表示进出的汽车正在处理中;绿灯表示有空位:红灯表示场内车位全满,不允许汽车进入。
(5)数码管显示模块:显示停车的各种信息,包括北京时间、停车位、停车时间、空位数、停车费用、营业总额、收费标准和操作提示等内容。本模块采用8个共阳数码管静态显示方式,节约了成本。
(6)操作键盘模块:通过4x4键盘(16个开关组成的行列阵1进行多种人丁操作,包括显示、查询各类信息,修改收费标准,校准北京时间,打印当前显示内容等。
(7)微型打印机模块:选用TPUP一40A,打印发票和总营业额。
其中,操作键盘模块、数码管显示模块、停车场状态显示模块、微型打印机模块和单片机控制中心合称为中心控制电路。
2.2 工作流程
当汽车通过或者停在停车场时,红外线检测模块将通知单片机有汽车进、出,单片机再根据停车场的状态控制停车场大门的开启、关闭,计算停车的时间和费用,并送显示器显示,打印机打印,处理键盘的显示、查询、修改要求。停车收费标准为n元/小时,超过30分钟按一小时计,否则不计。该系统还可以充当时钟。
3 红外线检测模块工作原理
红外线检测模块是本系统的主要模块。本节将详细介绍该模块的工作原理。
3.1红外线发射端
如图2所示,红外线发射电路包括相距一定距离的两个红外发射器D3和D4,用来发射红外线射束。两块NE555定时器芯片各自构成多谐振荡器,第一只为0.67KHz.其输出一方面送至第二只振荡器(21KHz方波)的4脚,对它进行调制,最后的输出用来点亮D3和D4;一方面送至IC5作为时钟信号,控制大门的开闭。
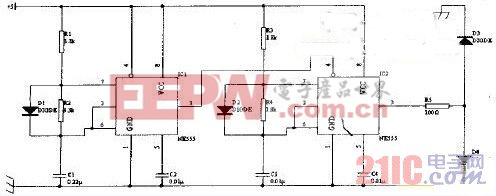
图2 红外线发射电路原理图

图3 停车位红外线接收电路原理图
红外接收器TSOP1738的输出为集电器开路形式,两只红外线射束分别送至红外线接收器U1、U2。当红外射束不被汽车阻断时,U1、U2输出都为0V,如果射束被阻断则分别输出+5V电平。因此只有当两只红外线射束都被阻断时,U1、U2才输出+5V电平,分别送至上升延触发与下降延触发的集成单稳态触发器U4、U5,使74121输出方波OUT1和OUT2,送至74LS148优先译码器,作为汽车进出车位的中断信号 当汽车驶入停车位时,单片机取出此时的系统时间送相应RAM,当汽车驶出停车位时,单片机再次取出该时刻的系统时间,并和初始时间相减,所得时间即为停车总时间,并送相应RAM。
4 单片机控制中心的设计
单片机控制中心控制着本系统所有信号的输入、
- MSP430F 在高速公路不停车收费系统(ETC)中的应用(06-05)
- 工控机在高速公路计重收费系统中的应用(03-21)
- 智能收费系统软件源代码(10-27)
- PTP2000及其在不停车收费系统中的应用(03-12)
- 基于IP网络的“软切换”视频联网监控技术(09-27)
- MSP430F 在高速公路不停车收费系统(ETC)中的应用(07-05)