基于单片机的模拟全自动洗衣机的设计
本设计基于模糊控制的模拟洗衣机系统,使洗衣系统朝着自动化、智能化,尤其是节能的方向发展。它可以根据被洗物的质地和脏污程度,自动对水量、水温、洗涤剂、机械力等做出控制,使衣物在洗净的前提下,洗涤过程更加节能。
1 凌阳单片机SPMC75F2413A
SPMC75F2413A 是由凌阳科技公司设计开发的工业级的16 bit微控制器芯片,其核心采用凌阳公司自主知识产权的μ′nSTM(发音为micro-n-SP)微处理器,集成了多功能I/O 口、同步和异步串行口、ADC、定时计数器等功能模块,以及多功能捕获比较模块、BLDC电机驱动专用位置侦测接口、两相增量编码器接口、能产生各种电机驱动波形的PWM 发生器等特殊硬件模块[2]。利用这些硬件模块支持SPMC75F2413A完成诸如家电用变频驱动器、标准工业变频驱动器、变频电源、多环伺服驱动系统等复杂应用。
2 全自动洗衣机的模糊控制模型
模糊控制是一种以模糊集合论、模糊语言变量以及模糊逻辑推理为数学基础的新型计算机控制方法。显然,模糊控制的基础是模糊数学,模糊控制的实现手段是计算机。
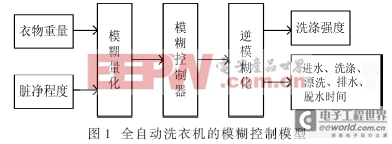
全自动洗衣机的基本工作过程包括进水、洗涤、漂洗、排水、甩干等。模糊控制技术用于全自动洗衣机后,可以根据对被洗衣物的检测,自动地获得最佳的洗涤方式,进而达到智能和节能的效果。本设计是以被洗衣物的重量和脏净程度作待测对象,设计出一系列适合不同衣物的清洗方式。全自动洗衣机的模糊控制模型如图1所示。
3 硬件设计
首先,将设计的洗衣机硬件部分进行模块化设计,主要分以下模块:
⑴检测模块:检测部分主要由各传感器和A/D转换器实现,其分为:布量检测、衣物污度检测等。对各部分检测结果通过A/D转换器进入单片机CPU中进行处理分析;
⑵控制模块:控制部分是整个智能洗衣机的关键部分,由单片机承担处理工作。传感器将检测的数据信息传入到控制器中,在控制器中经过分析处理,CPU将得到数据与标准数据进行比较,得出控制结果,如:加水量、洗涤时间、电机转速等,并将处理的结果输出至执行器动作;
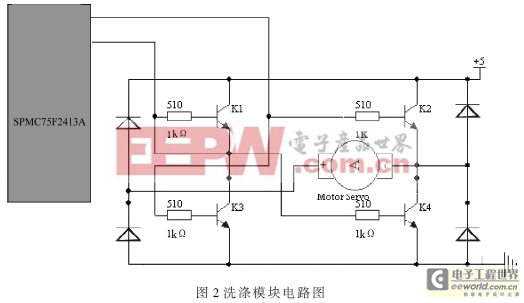
⑶洗涤模块:洗涤部分主要由电动机以及各种开关构成,通过CPU控制的电机正反转、速度以及开关的闭合完成各种洗涤动作。其硬件电路如图2所示;
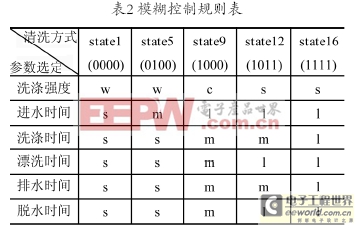
 以5种清洗方式为例,模糊控制规则表如表2所示。其中16种衣物检测状态由state1~state16表示;洗涤强度{弱,中,强}分别由变量{w,c,s}表示;时间的{短,中,长}分别由变量{s,m,l}表示。
以5种清洗方式为例,模糊控制规则表如表2所示。其中16种衣物检测状态由state1~state16表示;洗涤强度{弱,中,强}分别由变量{w,c,s}表示;时间的{短,中,长}分别由变量{s,m,l}表示。
⑷语音模块:语音部分由扬声器完成,通过CPU的控制,报告洗涤的进程;
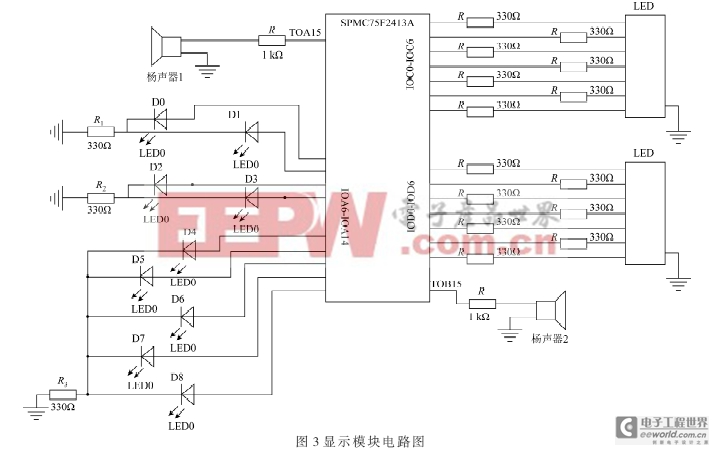
⑸显示模块:显示部分由一组LED数码显示以及9组发光二极管组成,用来显示洗涤的时间以及洗涤的工序。其硬件电路如图3所示。
4 软件设计及实物图
在模糊控制器中,需要把测定量先经模糊化,再送给模糊控制器。
上述测定量的模糊输入量的模糊集合分别为:衣物脏净{干净,较干净,较脏,脏}、衣物轻重{轻,较轻,较重,重}。
相应的模糊控制器的输出量的模糊集合分别为:进水时间(控制进水量){短,中,长}、洗涤时间{短,中,长}、漂洗时间{短,中,长}、排水时间{短,中,长}、脱水时间{短,中,长}、洗涤强度{弱,中,强}。
待清洗衣物的检测状态表如表1所示。表中0000~1111代表16种不同的检测状态。

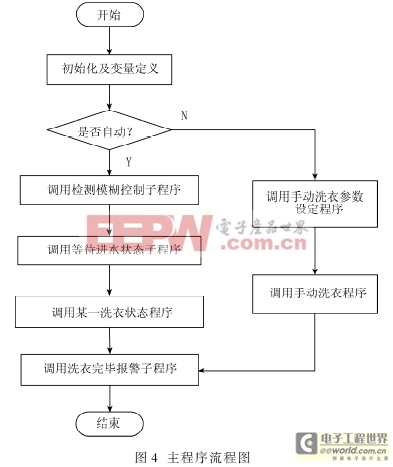
 软件主程序流程图如图4所示。衣物洗涤过程:开启洗衣机,选择自动或者手动方式,若为手动则设定洗衣参数,否则进入自动方式。检测衣物清洗前状态,进而自动选择相应的洗衣参数,调用相应的洗涤程序,完成模糊规则对衣物洗涤的控制。
软件主程序流程图如图4所示。衣物洗涤过程:开启洗衣机,选择自动或者手动方式,若为手动则设定洗衣参数,否则进入自动方式。检测衣物清洗前状态,进而自动选择相应的洗衣参数,调用相应的洗涤程序,完成模糊规则对衣物洗涤的控制。
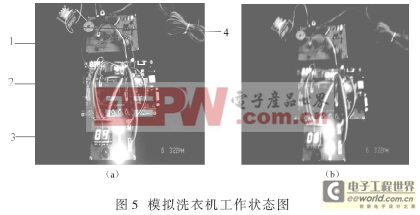
模拟洗衣机的工作状态图如图5所示。图中共有3个部分,如图5(a)中所示:1为电源及电机控制部分;2为主控制器凌阳单片机SPMC75F2413A;3为清洗状态显示部分;4为模拟洗衣机缸体转动的直流电机。其中图5(a)是状态12的漂洗状态,电机正反转,此时数码管显示剩余的漂洗时间。图(b)是状态12脱水状态,电机正转,数码管显示剩余脱水时间。
本设计采用凌阳16 bit单片机SPMC75F2413A作为控制核心完成了一个基于模糊控制的全自动洗衣机的模拟系统。系统通过对洗衣物检测状态信息的模糊推理,能够自动选择相应的洗涤方式,实现了对于清洗过程中洗涤强度、进水量、洗涤时间等一系列参数的较优控制和洗衣过程中洗涤、漂洗、脱水、排水等状态的模拟。通过软硬件的结合验证了设计方案是可行的,达到了设计的要求。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)