PIC16F877A单片机控制Modem的串行通信设计
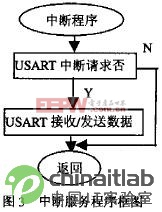
异步串行通信主程序框图如图2,中断服务子程序框图如图3。
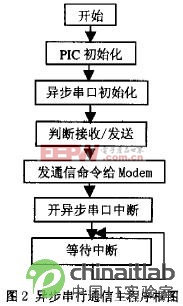
2.3 Modem设置
在Modem安装好开通之前,须预先设置好Modem的初始状态。PIC上电后,需对Modem进行复位操作,发送命令设置Modem结果码形式。
Modem初始化服务程序执行Modem初始化命令和呼叫(应答)等。Modem的呼叫、应答采用自动方式。在进行通信之前,呼叫PIC发出ATD (专线方式)命令,Modem监测线路上的载波。如果检测到载波,则返回连接成功结果码;否则返回无载波结果码。两端Modem正确可靠地建立起数据链路后。就可以进行数据通信了。通信完成以后,双方Modem若要拆线挂机.则Modem由数据状态转为命令状态,PIC发出ATH(挂机命令)实现挂机。挂机后要对Modem的自动应答和中断等状态进行重新设置。
3 PIC控制Modem 同步串行通信
用PIC的同步串口USART控制Modem实现同步数据通信,保证了数据的高效率和实时传输。PIC的USART模块工作于同步方式时,RC7引脚被用做数据双向传输通道DT,RC6引脚被用做时钟发送/接收专线CK。线路上的数据格式可以是8位或者9位,由于利用时钟专线进行双方同步,就不需要起始位和停止位了。同步数据是在一条线路上双向传输的,而时钟却是在一条线路上固定从主机向从机单向发送的。
同步串口的初始化与异步串口通信类似,程序设计可参照2.2,对Modem进行相应的初始化,使其工作于同步模式。
4 结论
本系统用PIC单片机控制Modem的同步/异步串行通信,实现了数据的远程传输,可方便提供多种速率,硬件构成简单,软件设计容易。在点对点的远程数字终端维护中,传输数据、话音及传真收到了很好的效果。
PIC16F877A 串行通信 相关文章:
- pic16f877a的电平变化中断(interrupt on change)使用误区(12-03)
- 用单片机pic16f877a实现鼠标数据的采集(12-03)
- PIC16F877A一路舵机参数化控制程序(12-02)
- PIC16F877A与PC机串行通信C语言源程序(12-02)
- PIC16F877A和AVR的单片机的PWM输出程序(12-02)
- PIC16F877的A/D模块(11-24)