基于ARM的装载机障碍物监测预警系统设计
1 引言
随着信息化、智能化、网络化的发展,嵌入式系统技术获得广阔的发展空间,工业控制领域也进行着一场巨大的变革,以32位高端处理器为平台的实时嵌入式软硬件技术将应用在工业控制的各个角落。嵌入控制器因其体积小、可靠性高、功能强、灵活方便等许多优点,其应用已深入到工业、农业、教育、国防、科研以及日常生活等各个领域,对各行各业的技术改造、产品更新换代、加速自动化化 进程、提高生产率等方面起到了极其重要的推动作用[1]。
现今,国内外虽有部分车辆安装了超声波倒车防撞报警装置、基于DSP的智能车辆防撞系统、图像处理技术的汽车追尾预警系统等,但是用于像装载机这种广泛用于城建、矿山、公路等工程的工程机械的障碍物监测预警系统却没有发现。所以建立一个对障碍物进行监测预警的系统,提前为驾驶员提供危险信号,让驾驶员能及时采用有效措施是减少事故的有效方法[2~5]。
2 系统硬件设计
本系统以装载机为研究对象,以实现信号采集、调理、传送、显示和预警为目的。把系统划分为障碍物距离信号采集模块、LCD显示模块、声光报警模块和处理器模块这四个部分。其中以处理器为核心,通过总线和接口电路把信号输入和输出相连。系统做成框图如图1所示。

图1 系统组成框图
该Mini ARM模块集成有C2290微控制器最小系统,USB主机控制器、10M以太网通信控制器以及NAND FLASH 电子盘,其硬件资源主要有:2M NOR FLASH、16K SRAM、2M/8M Bytes PSRAM、10M 以太网接口、2 路USB-Host 控制器、集成电子盘、2 路CAN控制器以及RTC等[6]。
LCD显示模块使用内置T6963C的液晶显示模块,该模块上已经实现了T6963C与行、列驱动器及显示缓冲区RAM 的接口。
2.1 障碍物距离检测电路的设计
对于障碍物的检测方法有超声波测距法、图像处理法、激光测距法等。但是由于超声波传感器具有信息处理简单、价格低廉、制作方便等优点。本系统采用超声波测距法来对障碍物的距离进行检测。
(1)超声波测距的原理
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为c,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离s[7],即s=ct/2 (1)。
(2)超声波测距电路
在本系统中超声波测距电路是由MICROCHIP的PIC16C57设计而成的,选用的超声波传感器是T/R40-16压电陶瓷传感器。在工作中,主控器PIC16C57发出信号使发射端的超声波换能器发出加以电压激励,其受激励后以脉冲的形式发射超声波,当超声波接收器接收到回波信号时,传回到主控器中,从脉冲信号开始发射时主控器中的定时器便开始计时,接收到回波信号时停止计时。所侧出的时间间隔再乘以声速就得到了两倍的距离值。从而计算出障碍物到发射点的距离。其电路图如图2所示。

图2 超声波测距电路图
距离值通过PIC16C57的10脚进行串行输出,经MAX232芯片后与ARM的串口相连。芯片MAX232是为RS232标准串口设计的接口电路,它完成TTL电平和RS232电平的转换[8]。
2.2 声光报警电路设计
本系统要求根据影响装载机稳定性的障碍物距离的临界值对危险状况进行三级报警。当处于低危险状况时,只有指示灯绿灯被点亮,提醒驾驶者注意;当危险级别增高时,指示灯黄灯点亮,同时伴随有舒缓的蜂鸣声,提醒驾驶者采取措施;当达到最高危险级别时,指示灯红灯被点亮,同时蜂鸣声由舒缓转为急促,提醒驾驶者赶紧制动。
设计中,分别采用了LPC2290的P2.20(GPIOA4)驱动绿色LED,P2.21(GPIOA5)驱动黄色LED, P2.22(GPIOA6)驱动红色LED,P2.23(GPIOA7)驱动蜂鸣器。所设计的报警电路如图3所示。

图3 报警电路图
3 系统软件设计
常用的嵌入式操作系统有VxWorks、Windows CE、嵌入式Linux和μC/OS-Ⅱ等,由于μC/OS-Ⅱ嵌入式系统具有公开源代码,具有实时多任务内核来进行多任务调度等优点[9],所以本系统选用μC/OS-Ⅱ嵌入式操作系统。
由于采用模块化编程,所以μC/OS-II下系统任务的划分也是基于不同的功能模块,每一个模块被分解成一个或者多个任务,每个任务被安排一个优先级。这样,一旦这些任务被建立起来,它们之间的调度情况就完全由μC/OS-II来完成。结合本系统的设计需求,程序中创建串口通信任务、报警任务、LCD显示任务。其软件流程框图如图4所示。
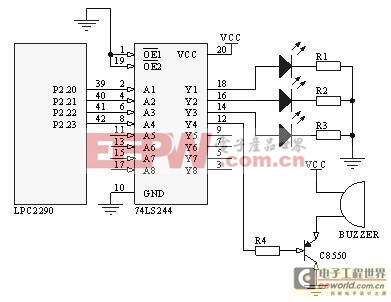
图4 软件流程框图
上电后,首先进行硬件的初始化,然后对μC/OS-II操作系统进行初始化,建立任务,进行多任务调度。μC /OS - II的任务调度是抢占式的,所以在设置任务
- 一种ARM单片机的条码精密测量系统设计方案(12-07)
- 基于51单片机多功能太阳能路灯的设计与实现(11-22)
- Cortex-M3 MCU如何走出差异化的8位单片机替代之路(10-31)
- 基于ARM的卷烟32位码防伪识别系统的设计与实现(04-17)
- 51单片机延时程序的设计方法(07-19)
- 基于IEEE802.1 5.4/ZigBee的语音通信系统(04-13)