基于双AVR单片机的悬挂物体寻迹控制系统
时间:01-03
来源:互联网
点击:

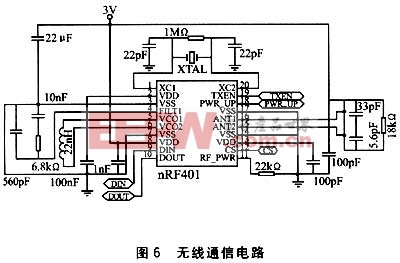
该传输进行了两级误码校验。do~d3是传输数据的低4位数据,d4~d6置o,d7为低4位数据的crc检验。
4 软件设计
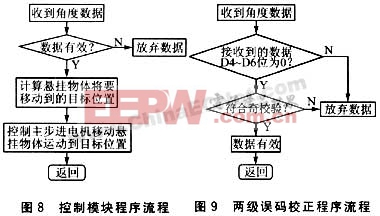
系统中悬挂物体寻迹采用双单片机控制方案,黑线检测模块和悬挂物体控制模块各自具有单片机系统,通过通信模块实现协同控制,完成悬挂物体寻迹任务。黑线检测程序流程和控制模块程序流程分别如图7和图8所示,通信误码校正流程如图9所示。

5 测试方法与结果
为了使悬挂物体可以沿任意曲线运动,本系统采用圆周曲线作为测试途径。圆周曲线包含4个方向的转折点,具有一定的代表性,圆周直径为30 cm,圆周长约94 cm,大于设计要求的80 cm。测试结果如表2所列。

结语
本设计以2片atmega128l单片机分别为黑线检测和悬挂物体运动控制的核心,仿照雷达扫描跟踪系统,利用微型步进电机和红外线传感器进行黑线的扫描跟踪,实现系统的连续黑线和断续黑线寻迹。黑线检测和运动控制两个核心通过无线数传模块实现检测数据和控制命令的相互通信。测试结果表明,本系统控制精度高,响应时间短,具有较强的断线寻迹能力。
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 基于AVR单片机的服装压力检测系统设计(05-03)
- 基于Atmel AVR单片机的无线图像侦检系统(10-19)
- avr单片机串口多机通讯及实例(12-03)
- AVR单片机入门系列(25)AVR PWM OC0(12-03)