基于单片机的遥控探照灯系统实现
在舞台上,有时为了营造某种特殊效果,需要关闭除探照灯以外的所有现场灯。探照灯必须照在演员身上。由于探照灯高高悬挂在天花板上,当演员移动时,依靠人工来完成探照灯方向调节非常不方便,而通过遥控调节则很方便,有时演员的位置又是固定的,这可能需要多台探照灯透视照射一个固定位置(例如舞台的中央)。如果探照灯能够将这些位置以及灯的亮度预存到某个频道,需要时再直接调则会方便很多。
针对此应用,本文设计了一种支持频道存储的遥控探照灯系统来实现上述功能。该系统还可应用在监狱、各种高空作业和旷野、海面等工作场所,对远距离巡查、追踪、搜索、拯救和作业施工进行全方位、多角度照明。
因为照射点的位置不定,要求探照灯可以上下左右360度自由移动,所以本系统采用了两个电机,一个控制探照灯上下转动,另一个控制探照灯左右转动,此外,有时两台探照灯离得很近。 当控制某一台探照灯时,不能影响邻近的探照灯,这就要求遥控控制信号的角度不能太大。相反,如果角度过小的话,探照灯又很难接收到信号,会使控制很不方便,因此信号的角度也不能太小,另一方面,为便于操作,探照灯的可控制距离应尽可能地远。
针对上述要求,本文采用了红外与激光通信相结合的方法,在发送探照灯预选信号时采用激光发送,而发送探照灯转动控制、亮度控制时等命令时采用红外发送,在场景存储及调出摸式的最后确认(控制哪台探照灯)时采用激光发送,从而实现准确,方便的调节,灯的亮度控制应尽可能采用微调来满足各种亮度的需求,因此,将灯的亮度从最亮到熄灭划分为256个段。
硬件系统设计
1、总体结构
该系统共包括5个模块:CPU模块、电源模块、电机模块、灯控模块和通信模块。其中,通信模块又包括红外通信模块、激光通信模块和指示灯显示模块,总体硬件原理框图如图1所示。
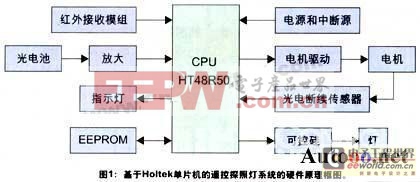
红外接收模组接收红外信号后送入CPU进行分析,以确定命令的性质,遥控器发送的激光信号由光电池接收,经放大后送入CPU。由光电继续器、电机驱动及电机组成的闭环电路用来控制电机的位置,以控制探照灯的照射点,在电源模块中产生一个2倍工频的信号,该信号连接到CPU的中断脚,中断程序通过可控硅控制灯的亮度,EEPROM用来存储频道、探照灯位置和亮度,指示灯用来显示探照灯当前的状态。
2、CPU模块
处于成本的考虑,该系统的各个子功能模块须尽量减少硬件,并尽可能用软件代替硬件,所以该系统的红外通信模块、激光通信模块的解调都完全由软件实现,这就使得CPU中无需这些专用模块,从而降低了成本,电机的驱动也没有采用专用的驱动芯
片,而是由通用I/O接口通过三极管来驱动电机转动。
[next]
由于节省了许多专用模块,因此必然会增加对CPU通用I/O的需要,这就要求CPU中要有足够的通用I/O接口,此外,系统还必须能稳定可靠地工作,并具有较强的抗干扰能力。
基于以上原因,本方案选择了Holtek公司的低价位I/O型单片机HT48R50A-1,这是一款基于RISC结构、低功率、安全静态CMOS设计的高性能8位单片机,该单片机的工作电压在8MHz时为3.3V-5.5V,4MHz时为2.2V-5.5V,它的功率损耗低,在5V/4MHz条件下的典型值为2mA,不使用看门狗定时器和RTC时,3V下静态电流小于1μA,此外,它还具有工业级的工作温度(-40℃-85℃)。
HT48R59A-1器件的其他特性还包括:具有4096×14位程序存储器ROM、160×8位数据存储器RAM、6级堆栈;具有表格读取功能,支持直接和间接两种寻址模式;共有63条功能强大的指令。支持位操作,大多数指令执行时间只需要一个指令周期;
片内有32个具有上拉功能的双向输入输出接口,PA接口具有唤醒功能;有一个外部中断输入和事件计数输入。蜂鸣器驱动并支持PFD;内置晶体及电阻电容振荡电路,拥有看门狗定时器;具有预分频器及中断功能的定时器;CPU在没有任务时可以进入暂停模式以降低功耗,且具有低电位复位(LVR)特性。
3、通信模块
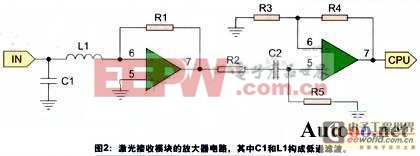
红外接收模组可以直接将接收到的红外信号变为TTL电平,激光接收模组则不同,由光电池接收到的激光信号非常微弱须经放大后才能被单片机识别。64页图2为放大电路,其中C1和L1构成低通滤波,第一级运放和R1、R2将光电池的电流信号转换为电压信号,C2和C5为高通滤波,第二级运放和R3、R4将电压放大成TTL电平。
4、灯控模块
nbsp; 硬件原理如图3所示,T1为滤波电感,Q1为可控硅,U1为光电隔离器,CPU信号通过Q2控制U1的通断,当U1导通时,Q1导通,当U1关断时,反相电压使Q1截止,通过控制可控硅的导通时间可实现控制灯的亮度控制。

5、电机模块
该
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)