基于ATMEGA128的CAN-GPRS网关设
设定的参数进行数据传输,而无需再进行干预了。www.51kaifa.com
在本设计中采用的是SerialNET模式。GPRS模块的初始化首先通过UART0发送三个’+’退出在线模式,之后大约等待15秒左右,收到I/ERROR (056)CR>之后即可以向模块发送命令。发送AT+IUPCR>命令上线并建立一个PPP Internet连接开始Internet会话,收到I/ONLINECR>后即成功上线。再发送AT+I!SNMDCR> 激活SerialNET长连接模式,收到I/DONECR>即进入serialNET模式,此时则可进行数据传输。(源代码略)
3.4 CAN接收数据处理任务
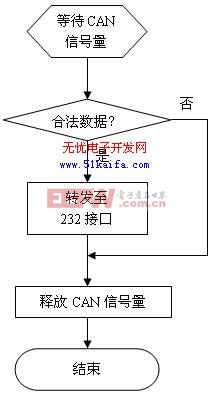
CAN数据的接收与处理通过外部中断0来实现,当数据接收完成时产生中断,在中断程序中发送CAN信号量通知CAN接收数据处理任务对收到的数据进行处理。其流程图如下(源代码略):
图4 CAN接收数据处理任务流程图 |
3.5 GPRS接收数据处理任务
GPRS数据的接收与处理通过UART0接收中断来实现,在UART0接收中断程序中发送UART0信号量通知GPRS接收数据处理任务对收到的数据进行处理。不同的是通过UART0将数据转发到CAN接口上,就不再赘述。
4. 结束语
本文设计的CAN-GPRS网关电路简单可靠, 使用方便。现已应用于某工程当中,实际运行状况良好,数据传输稳定可靠,很好的达到了预期设计的效果。
本文作者创新点:采用GPRS模块将CAN现场设备网通过GPRS与远程技术控制中心联系起来,实现了远程技术控制中心对CAN现场设备网的即时反应、远程监测以及远程诊断。
参考文献:
[1] 陈啸呐,贺前华,苏勇.基于LPC2119的RS485-CAN总线转换器设计[J].微计算机信息,2006,5-2:20-22
[2] 饶运涛,邹继军,郑勇芸.现场总线CAN 原理与应用技术[M].北京航空航天大学出版社, 2003
[3] Labrosses Jean J, 袁勤勇等译.嵌入式系统构件[M].机械工业出版社, 2002www.51kaifa.com
[4] Labrosses Jean J, 邵贝贝等译.嵌入式实时操作系统μC/OS II[M].北京航空航天大学出版社,2003
[5] 耿德根,宋建国,马潮,叶勇建.AVR高速嵌入式单片机原理与应用[M].北京航空航天大学出版社, 2001
- 基于ATmega128单片机的矿用磁力启动器控制系统设计(06-04)
- 一款宠物狗无线感知交互系统让人和动物的社交网络成真(06-03)
- ATmega128 流水灯的两种实现方法(基于AVR GCC)(11-23)
- Atmega128串口详解(11-23)
- 基于ATMEGA128单片机压力的测量(11-21)
- ATmega128型号标识说明(11-11)