基于PIC单片机的测速系统设计
脉冲作为加法计数器的时钟信号。在被测信号一个周期的开始启动加法计数器;然后,到这个周期的结束停止计数,假设这时候计数器的值为M ,参考脉冲的周期为Tm ,则M、Tm 与被测信号周期T有如下的关系:
T = M * Tm 转速 n = 60/T = 60/(M * Tm) (转/min)
在这一节只讨论转速的检测方法和误差处理,因为转速和速度的检测方法和误差处理是相似的。转速n与速度v的关系为:v = n * L/ 60 (米/秒) (其中L为转盘周长)
一个Tm 周期对应的转速为: n/M = 60/(M * M * Tm)
根据图(3)所示,最大的误差有2 * n/M,即最大误差 = 2 * n/M = 120/(M * M * Tm)。
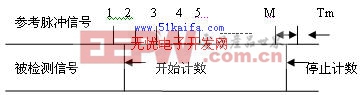
图(3)参考脉冲信号与被检测信号之间的关系
这样就得到了为什么周期法适合于测量低频信号的原因。从误差关系式可看出,当n大时,则误差 大;当n小时,则误差
大;当n小时,则误差 小。,从上式也可得到减少误差n 的两个方法:一个是增加M;另一个是增加Tm。对于一台确定的检测仪而言,Tm是一个固定的常数。这样只有增加M值。但是,对于一个转速n,一个周期内的M也是一个相对固定的值。因此,要增加M值就只有增加检测的周期数,即由一个周期内的测量扩大到多个周期的测量。如果假设N个周期内的计数值为Mn,则有:
小。,从上式也可得到减少误差n 的两个方法:一个是增加M;另一个是增加Tm。对于一台确定的检测仪而言,Tm是一个固定的常数。这样只有增加M值。但是,对于一个转速n,一个周期内的M也是一个相对固定的值。因此,要增加M值就只有增加检测的周期数,即由一个周期内的测量扩大到多个周期的测量。如果假设N个周期内的计数值为Mn,则有:
可见这两式是相互矛盾的。要减少误差就必须增加N,而这时测量时间就相应增加;要减少测量时间就要减少N,而这时的误差就相应增加。显然,要预先确定一个恰当的N值是比较困难的。因为,不同的转速对应不同的N值。
针对N值难以确定这个问题,本文采取了一种比较合理的确定N值的方法。对于单片机而言,它的计数器的位数是有限的,假设为P位。对一个转速n而言,当计数器达到满刻度时,对应的误差是最小的。因此,为使检测的误差最小,就可以以计数器是否达到满刻度为标准来确定一个转速n 对应的N值。假设单片机指令执行周期为Tm,计数器溢出时间为Tn,检测到的信号次数为N,此时的转速为n,就有如下关系式:
Tn = ( ) Tm 误差: n = 120/[( )( ) Tm/N]
转速: n = 60N/ ( ) Tm (转/min)
从n与N的关系式中可以看出,这时侯不同的n有不同的N值。为求计数器达到满刻度时的N值,具体做法是:用单片机的计数器1来计时,再用软件设计一个计数器对被测信号进行计数。当计数器1溢出以后,取该计数器的值就可计算得到要求的N值。这样就不要象通常的多倍周期法那样,预先确定一个N值。
4 测速算法与系统实现程序
本文采用PIC单片机实现测速系统,在PIC中档系列单片机中,定时器TMR1是一个标准配置,它是一个16位的定时器/计数器。如图(2)所示,我们将检测信号输入到单片机INT端。利用定时器1的定时和INT的中断功能来实现测量。
4.1 主程序流程图见图(4)
(1)初始化程序:初始化定时器1、INT1及各输入输出口设置,清显示缓冲区等。
(2) 按键扫描程序:当扫描到有按键按下时做出相应的响应,用来设置上下限报警值、测量模式以及被测转盘周长。
(3) 测量值比较与报警:用显示缓冲区的值与预设在EEPROM中的上下限报警值逐个比较,当大于上限值或小于下限值时报警。
(4)显示程序:将显示缓冲区的BCD码经查表译码后送七段数码管显示。
4.2 中断服务程序流程图见图(5)
(1)中断类型判断:当TMR1中断时,计数器1溢出次数W =W+1;当INT中断时,被检测信号周期数N =N+1;当RB4电平变化中断时,保存需要掉电保护的数据到EEPROM中;
(2)转速n的计算公式为: ,其中Tm为指令执行周期;速度的计算公式为:v=n*L/60(米/秒)其中L为转轮周长。
,其中Tm为指令执行周期;速度的计算公式为:v=n*L/60(米/秒)其中L为转轮周长。

图(5)中断程序流程图
周期;速度的计算公式为:v =n*L/60(米/秒) 其中L为转轮周长。
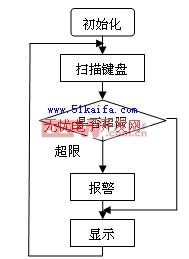
图(4)系统主流程图
5 结语
本文介绍了一种利用单片机为核心器件实现高精度转速和速度测量的系统。经过对测速系统的误差分析,论证了该方法的可行性和实用性,并成功的利用该系统实现了对卷扬机速度的测量,测试中各项功能正常,运行可靠,使用方便,效果好,达到了设计的要求。
本文作者创新:采用了以单片机定时器溢出为准来确定多倍周期法倍数N的方法,成功的解决了倍数N难以确定的难点;设计了测转速和测速度两种测量模式,有上下限报警功能使得该系统具有更加广泛的应用前景。
参考文献:
[1]姜庆明、杨旭、甘永梅、王晓钰、王兆安。一种基于光电编码器的高精度测速和测加速度方法[J]。微计算机信息,2004,6:48-50。
[2]张明峰。PIC单片机入门与实践。北京航空航天大学出版社,2004年第1版。
单片机 转速 软件 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)