基于双CPU的切换及控制系统设计
示。
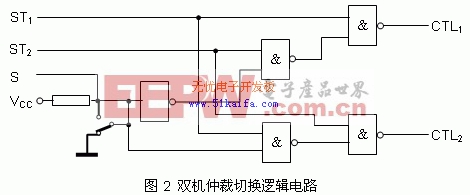
由真值表可得仲裁切换电路的两路控制三态门的控制信号逻辑CTL1、CTL2分别为:
 ,
,
构成的仲裁切换电路如图2所示。
4 CPU状态监控电路

监控电路采用了具有电源监控电路和看门狗功能的微处理芯片MAX813L,该芯片它具有4个功能:
①看门狗计时器功能。当看门狗输入信号在1.6s内无变化时,产生看门狗输出;
②电压监控功能。当掉电或电源监测电压低于1.25V时,产生掉电输出;
③电复位功能。当上电时自动产生脉宽200ms的复位信号;
④人工复位功能。当人工复位端输入低电平时,产生复位信号输出。
MAX813L采用DIP-8封装,如图3所示,引脚功能说明如下:
①MR:手工复位输入端,可接人工复位按钮,该端输入低电平保持140ms以上,可产生复位(RST)信号;
②Vcc:+5v电源;
③GND:电源地;
④PFI:电源检测输入端;
⑤PFO:电源检测输出端,电源正常时,保持高电平;
⑥WDI:看门狗输入端。俗称“喂狗”信号,必须在1.6s内使该端输入反向信号;
⑦RST:复位输出端。高电平有效,可输出200ms的正脉冲,当电源Vcc低于4.65v时,RST保持高电平;
⑧WDO:看门狗输出端。正常工作时输出高电平,当WDI信号在1.6s内不能及时送入并反向时,该端输出低电平信号。
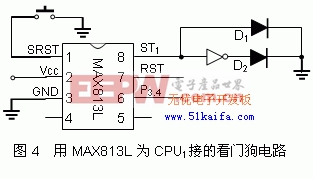
因AT89C51无看门狗功能,为了监测系统状态,在本系统中主要利用的是MAX813L的看门狗计时器功能。其中看门狗输入端WDI由CPU的P3.4提供,CPU在规定的时间内定时改变P3.4
的状态,由看门狗输出端WDO提供当前CPU的状态信号至仲裁切换电路的STi(i =1或2)端,从而由仲裁切换电路自动或手动确定主机。图4为用MAX813L为CPU1接的看门狗电路,当CPU1工作正常时能正常提供P3.4信号则WDO端ST1输出高电平,D1亮D2灭;当CPU1工作不正常时不能正常提供P3.4信号则WDO端ST1输出低电平,D2亮D1灭。
5 系统硬件电路
图5为利用本文介绍的双CPU的切换及控制系统组成的一种硬件电路。从图中可知,系统每个CPU都可以通过RS232串行口与上位机通信,两片 CPU彼此独立运行,通过双机仲裁切换逻辑电路共享外部16KB RAM和控制8路I/O口输出。利用这种方法还可以通过增加三态门组成更大容量(最大64KB)的外部RAM和更多的输出控制I/O口或扩展I/O口。

图5 一种双CPU的切换及控制系统的硬件电路
6 结束语
该双CPU控制系统构思独特,两个CPU彼此独立运行,但读写的都是同一块外部RAM的数据,只是只有主CPU能实际读写数据,故不存在内存数据交换和共享问题,同时也只有主CPU能输出控制外部设备,可广泛应用于要求高可靠性控制的场合,作者将该项技术应用到自行研制的电脑样板切割机上取得了较满意的结果。
[参考文献]
[1] 李耀民,邬义杰.智能流量检测系统高可靠性数据保护方法研究[J].机电工程,2002,19(5)
[2] 赵跃龙,王霜剑.51系列单片机双CPU系统通信方法[J].单片机与嵌入式系统应用,2003,3
[3] 周建勇,何为民.多CPU单片机系统设计在社区安防系统中的应用[J].中国电子网
[4] 黄再银,宗建华.闭路电视监控系统中解码器的设计[J].中国有线电视,2002,8
[5] 何立民.单片机应用系统设计[M].北京:北京航空航天大学出版社. 1990.5
[6] 杨恢先,黄辉先等.单片机原理及应用[M].长沙:国防科技大学出版社. 2003.3
[7] 方晓,马晓平. 基于双CPU计算机的无人机回收系统冗余度设计[J].微计算机信息,2004,1,23-24
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)