基于单片机的智能无功补偿仪的设计
1 引言
随着电力系统的快速发展,电力网容量不断增大,结构日趋复杂,电力系统中的自动化设备的运用越来越广泛。在电力负荷中,有相当一部分是感性负荷,它不仅消耗大量的有用功功率,也吸收大量的无功功率从而造成功率因数下降,导致无功电源不足,系统电压降低,损耗电能,降低供电能力。因此提高功率因数,可以保证供电系统安全运行并减少电能损耗,节约电能。一般情况下功率因cosφ大于0.9而小于1。由于感性电流是随机的,因此补偿电容器的投切也要随时跟踪变化。本文介绍的便是这样一种智能型无功补偿仪器。
2 无功功率的基础知识
在正弦电路中,负载是线性的,电路中的电压和电流都是正弦波。设电压和电流可以分别表示为

式中:
 —电流滞后电压的相角。
—电流滞后电压的相角。
电流i被分解为和电压同相位的分量ip和比电压滞后 90°的分量iq·ip和iq分别为

电路的有功功率P就是其平均功率,即

电路的无功功率定义为: 
可以看出,Q就是上式中被积函数的第二项无功功率分量uiq的变化幅度。uiq的平均值为零,表示了其能量交换而并不消耗功率。Q表示了这种能量交换的幅度。在单相电路中,这种能量交换通常是电源和具有储能元件的负载之间进行的。从上式可以看出,真正的功率消耗是由被积函数的第一项有功功率分量uip产生的。因此,把上式所描述的ip和iq分别称为正弦电路的有功电流分量和无功电流分量。
对于发电机和变压器等电器设备来说,其额定电流值与导线的截面积及铜损耗有关,其额定电压和绕组电气绝缘有关,在工作频率一定的情况下,其额定电压还和铁心尺寸及铁心损耗有关。因此,工程上把电压电流有效值的乘积作为电器设备功率设计极限值,这个值也是电器设备最大可利用容量。因此,引入如下视在功率的概念:
S=UI
可知,有功功率P的最大值为视在功率S,P越接近S,电气设备的容量越得到充分的利用。为反映P接近S的程度,定义有功功率和视在功率的比值为功率因数  。
。

可以看出来,在正弦电路中,功率因数是由电压和电流之间的相角差决定的。在这种情况下,功率因数常用cosφ来表示。
P、S和Q有如下的关系:

应该指出,视在功率只是电压和电流有效的乘积,它并不能准确反映能量交换和消耗的强度。在一般电路中,视在功率并不遵循能量守恒定律。
3 动态无功补偿装置原理及硬件框图
供电系统为220伏或380伏的电压,我们通过一个硬件电路将此220伏或380伏的电压转换为 0~5伏的电压,然后通过A/D转换器将此电压信号读到单片机中,在单片机中我们已经事先编写好了算法程序。可以通过此程序来判断此供电系统是否需要进行无功补偿,即cosφ的值是否大与0.9,如果小于0.9则需要进行无功补偿。从而控制电容开关的断开和闭合完成无功补偿。
3.1 控制器工作原理及硬件组成
低压无功补偿系统的工作原理框图如图1,

图1 低压无功补偿系统的工作原理框图
该系统主要由控制器、无功补装置、后台配电管理系统和系统工作电源等组成。
主控制器在一个工频周期内等间隔地采集32个瞬间电压、电流数据后,经微处理器处理计算出电网电压、电流(包括零序电流)、功率因数、无功功率、有功功率、电压电流1~11次谐波等负荷参数值,存储并送参量显示单元显示,同时根据现场的实际情况通过控制器键盘设置参数来控制电容投切。因此该控制器具有负荷监测和无功补偿双重功能。控制器输出驱动接口,根据用户设置能够实现三相共补和分相补偿,因此不必考虑三相负荷的不平衡。电容投切采用“循环投切”方式和“共补先投、分补后投、投过不投,故障速切”的原则。另外,控制器通过数据通讯接口将记录的数据送给抄表机或直接送给计算机,利用配套的后台管理系统软件进行查询、统计、报表输出、曲线打印等。
4 系统软件的组成与设计
本系统采用C语言编程,软件模块总体可分为以下两个部分。
4.1 中断部分
中断部分由以下四部分组成:
(1) 定时中断。为系统的延时操作提供计时。例如:主程序部分的运算模块每30s运行一次,它的定时由定时中断计时。
(2) 键盘管理中断。接收键盘键入的键值,键值分为两种功能:查看数据(通过LCD显示)和设置系统参数。
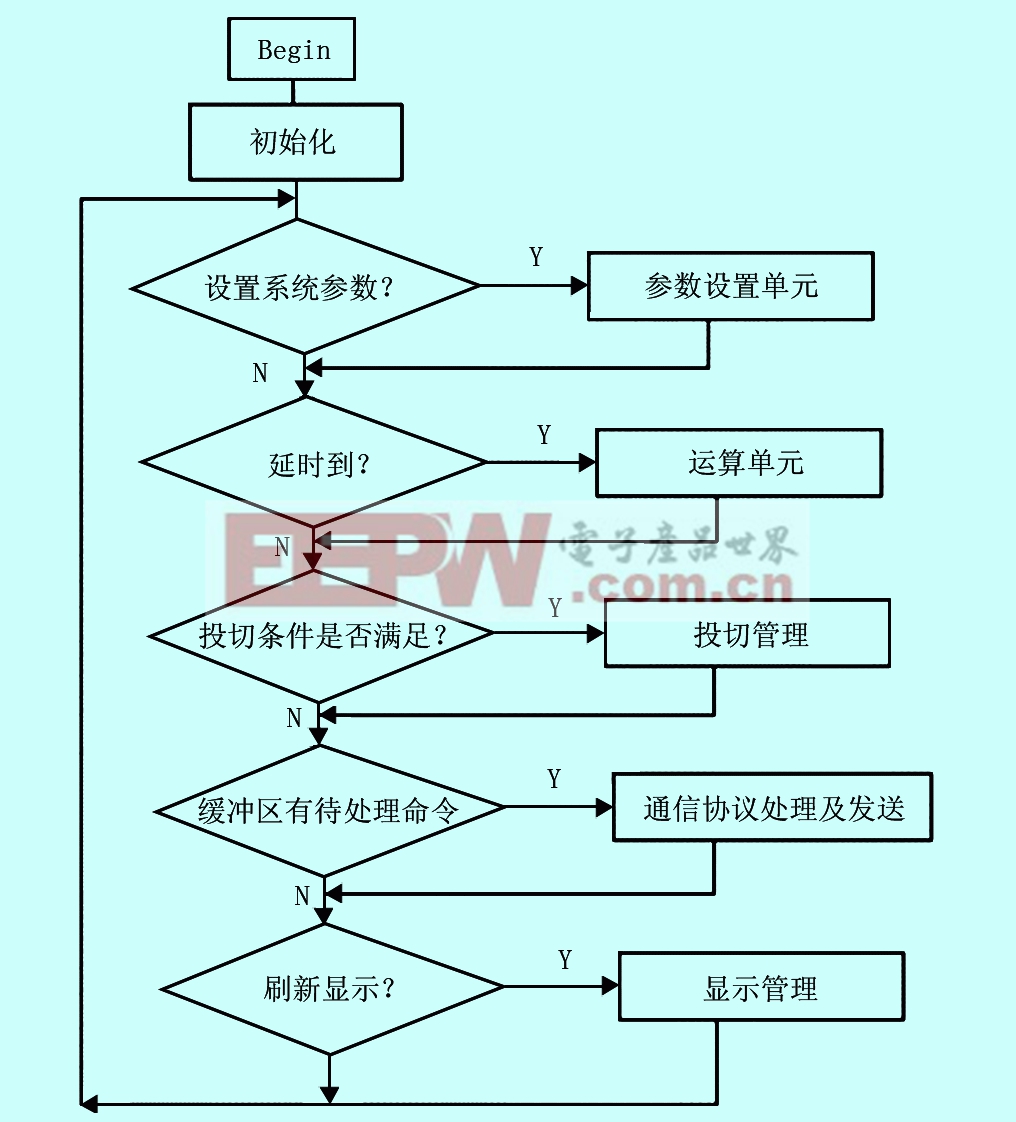
图2主程序
(3) RS-485通信中断。判断是上位机发送来数据引起的中断还是下位机发送来的数据引起的中断。接收远端发送来的数据。首先将接收数据放入数组,一帧数据接收完成则存入接收/发送缓冲区,并置有效标志待主程序的通信协议处理及发送单元处理。
(4) 串口中断。通过RS-232可进行现场测试数据、调试程序以及设置系统参数。RS-232接收数据处理过程与RS-485基本相同。
4.2 主程序部分
主程序有以下六部
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)