基于测距传感器的动态车辆智能宽高检测系统设计
现代仪器仪表的智能化趋势使得各种传感器的应用日益广泛。由于激光具有许多优点,使得利用这些特性研发的激光检测和控制系统具有先进的技术性能、方便的使用性能和简洁的系统结构。激光传感器一般是由激光发生器、光学零件和光电器件所构成的,它能把被测物理量(如距离、流量、速度等)转换成光信号,然后应用光电转换器把光信号变成电信号,通过相应电路的过滤、放大和整流得到输出信号,从而算出被测量。借助于激光所具有的优点(如方向性好、亮度高、单色性好、相干性好等),激光传感器通常具有结构简单可靠、抗干扰能力强、非机械接触、分辨率高、精度高、示值误差小、稳定性好、宜用于快速测量等优点。
随着科技的不断发展,国家对治超工作的要求也不断提高,无论是从效率还是精准度来说,智能化的超限检测工具必将得到广泛的应用。鉴于上述情况,设计了基于激光扫描传感器技术的高效率高精度的智能型车辆超宽超高检测系统。
1 激光测距传感器的测量原理
激光测距是一种主动光学探测方法。主动光学探测的探测机制是:由探测系统向目标发射波束(在光学探测中,一般是红外或可见光),波束被目标表面反射产生回波信号。回波信号中直接或间接地包含待测信息。接收与信号处理系统通过接收和分析回波信号,获得被测量。激光具有相干性强、亮度高、方向性好等优点,因此激光出现后,立刻成为了绝大多数主动光学探测系统的首选光源。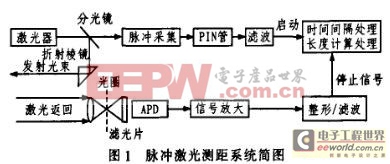
目前,脉冲激光测距已获得了广泛的应用,如地形测量、地球到月球距离的测量等。图1为脉冲激光测距系统简图,其工作原理如下:人机操作发出测距指令,触发激光器发出激光脉冲,一小都分能量透过分束片,作为参考脉冲直接送到脉冲采集系统,作为计时的起始点,启动数字式测距计时器开始计时;另一帮分由折射棱镜反射,射向目标。一般发射前端有望远光学系统,为的是减少出射光束的发散角,以提高光能面密度,增大工作距离,还可以减少背景和周围非目标物的干扰。到达目标的激光束有一部分被表面漫反射回到测距仪;经接收物镜和光学滤波器,到达探测器APD,窄带光学滤波器的主要作用是充分利用激光优良的单色性,提高系统的信噪比;光探测器APD将光信号转换为电信号,然后将电信号进行信号放大、滤波整形。整形后的回波信号关闭时间间隔处理模块,使其停止计时。这样,根据时间间隔处理的结果t即可计算出待测目标的距离L为:
L=ct/2 (1)
式(1)中,c为光速。图1中,滤光片和光圈可以减少背景及杂闪光的影响,降低探测器输出信号中的背景噪声。根据式(1),脉冲测距精度△L,可以表示为:
△L=c△t/2 (2)
由式(2)可知,系统处理的时间阃隔精度△t直接决定了脉冲激光测距系统的测距精度△L。
2 系统组成及数据处理
本系统以德国SICK公司的LMS系列户外型非接触式激光传感器为数据采集设备,用工控机作为数据的处理设备,系统组成如图2所示。L MS系列传感器是一种户外型非接触式的高精度、高解析度外部传感器,其工作原理是基于对激光束飞行时间的测量,其按照定义好的时间间隔发出激光脉冲,通过定时器计算发射脉冲和接收脉冲之间的时间间隔来得到与被测物体之间的距离。脉冲激光束经过测距传感器内部的一个旋转反光镜的反射对周围环境形成扇面扫描。目标物体的轮廓线曲所接收到的一系列脉冲序列来确定。LMS传感器的扫描频率是25Hz/50Hz,角度频率是(0.25°/0.5°,扫描角度范围是0°~270°,最大扫描距离是20 m,标准测量精度为±0.30 m,安全防护等级为IP67,对人眼安全。恶劣的环境因素对测量范围没有影响,可用于室外温度-30~+50℃的环境中。LMS系列激光传感器采用激光脉冲测距的方法计算出被测物体的扫描轮廓线上若干点到传感器的距离,并以极坐标的形式实时地通过高速网络接口上传给工控机进行后期处理。由于网口的数据传输速度可达100Mb/s,所以不会出现数据丢失问题,保证能实时地完整地将所测数据上传到工控机进行数据处理。工控机通过可视化编程语言VB的网络通讯内核Winsock与LMS系列传感器直接进行数据的交换。在使用Winsock控件时,首先要考虑使用TCP还是UDP通信协议。TCP通信协议控件是要求连接的通信协议,类似于电话系统。在开始数据传输前,使用者必须先建立连接,其上还有错误检查机制,避免数据被分散传递,因传输的过程较慢而错误较少。如果数据是比较重要的,使用此方式比较好。而UDP通信协议是一种不需要连接的通信协议,两台计算机之间的传输类似于传递邮件:信息从一台计算机传送到另一台计算机,但是两者之间没有明确的连接。由于和TCP的方式比起来,它的错误检查比较简单,因此速度比较快,要求速度时,使用此方式比较恰当。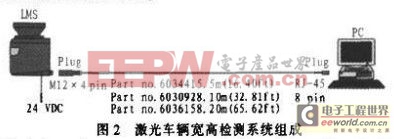
本系统对于数据的实时性要求比较高,且对数据的准确性要求相对较低,所以数据交换之前,首先要分别将LMS系列传感器和工控机的IP地址设置为一个网段,再使用UDP通信协议来进行数据的交换。工控机接收到LMS系列传感器上传的极坐标信息后,再通过基于VB内核设计的数据处理程序对所有数据进行处理,数据处理的过程如下。
首先,通过传感器上传的数据判断车辆的驶入与驶出。
第一步,传感器上传测量到的传感器到被测车辆的不同点的极坐标的极半径(ρ1,ρ2,ρ3,……,ρn)和对应的极角(θ1,θ2,θ3,……,θn);
第二步,通过坐标系的变换将被测点的极坐标转换为平面直角坐标,即
(x1=ρ1·cosθ1,y1=ρ1t·sinθ1)(x2=ρ2·cosθ2,y2=ρ2·simθ2)(x3=ρ3·c∞θ3,y3=ρ3·sinθ3)……(xn=ρn·cosθn,yn=ρn·sinθn);
第三步,分别比较y1,y2,y3,……,yn,取最小的y值ymin;再分别比较x1,x2,x3,……,xn取扫描到的被测车辆的最左边的x值xmin和最右边的x值xmax;计算单次扫描的车辆的最大高度Height=H-ymin和最大宽度Width=xmax-xmin(H为传感器距离地面的高度)。将备单次测量所得的宽度与高度进行比较,根据数据的变化曲线来判断进车与出车。
然后,通过比较各单次测量的车辆的宽度和高度信息进行逐次比较,计算车辆的最大高度Height和最大宽度Width。最后,将得出的过往车辆的最大宽度和最大高度,与国家规定的车辆宽高限制值相比较,从而判断过往车辆是否超宽超高,比较的结果通过工控机的显示器显示出来,同时保存测量结果到SQL数据库。如果车辆超宽超高的话,工控机还会产生声光报警,以提醒治超人员和超限车辆的司机出现了超限问题。
二维激光脉冲 激光脉冲 扫描传感器 车辆超限检测 数据库 相关文章:
- 基于激光脉冲测距传感器的动态车辆智能宽高检测系统设计(03-05)
- 基于虚拟仪器的特性测试参数数据库的设计(06-24)
- 嵌入式数据库在Java中的应用(03-03)
- SQLite嵌入式数据库系统的研究与实现(02-20)
- 嵌入式移动数据库系统中的数据查询(02-21)
- Linux EXT3下删除MySQL数据库的数据恢复(05-26)