基于PIC单片机的机器人灵巧手的控制系统设计
时间:02-13
来源:互联网
点击:
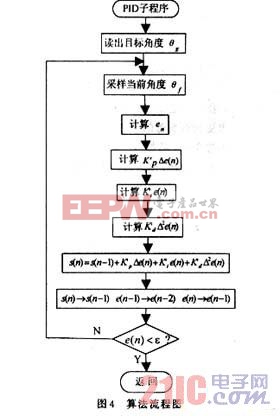
这一点可以克服[4]。对于PID在本系统中对于该算法的软件流程图如图4所示。
4结语
采用PIC单片机设计的三指灵巧手较好地完成了抓取实验,所有的硬件设计比普通的8 b 单片机更为简洁,系统更为稳定,操作简单。相比较利用专用的集成驱动电路和高性能的数 字信号处理器组成的系统,采用该方案成本更小,整体的性能也相当好。
参考文献
[1] Okada T.An artificial finger equipped with adaptability to an object Bullelectrotechlab, 1974,37 (2):1078-1090.
[2]武锋.PIC系列单片机的开发应用技术[M].北京:北京航空航天大学出版 社,2000.
[3]何信龙,李雪银.PIC16C7X入门与应用范例[M].北京:清华大学出 版社,2001.
[4]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002.
控制系统 设计 巧手 机器人 PIC 单片机 基于 相关文章:
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于DSP的新型弹载控制计算机(04-05)
- 基于TMS320VC5509A的语音识别与控制系统(06-17)
- 基于DSP的智能刹车控制系统研究(07-29)
- 基于DSP的逆变电源控制系统设计(08-11)
- 基于DSP的混合悬浮控制系统的硬件设计(01-13)