基于DSP无刷直流电动机控制系统的研究
摘要:采用DSPTMS320F2812来控制永磁无刷直流电动机,并且对整个控制系统原理进行了介绍与说明。通过上位机(PC机)来对电流、转速进行数值设置,DSP作为下位机来接受参数并且实时进行检测,根据模糊PID控制算法对数据进行调整和处理,达到实时的处理效果,并且上位机采用VC++进行编程,友好的人机界面,操作方便简单。整个控制系统性能高,而且易于控制算法的实现。
关键词:DSP;TMS320F2812;无刷直流电动机;模糊PID;模糊控制器
随着现代电力电子技术的发展,出现了许多高性能功率器件以及新型高性能稀土永磁材料,这些都为无刷直流电机的应用奠定了基础。现今,无刷直流电动机应用的领域非常广泛,如多电飞机燃油系统、多电飞机刹车系统、医疗器械、家用电器等方面的应用,在航空航天等国防工业中也具有越来越广泛的应用。数字信号处理技术DSP及其硬件芯片微处理器技术迅猛发展,它不仅能实现高精度、高可靠性而且能够简化系统结构,增加了系统功能,具有控制灵活,智能水平高,参数易改等特点,所以DSP无刷直流电动机的控制系统运用前景广泛,实用性高。
1 系统原理及构成
无刷直流电动机系统的原理:无刷直流电动机的电磁转矩与电流近似呈线性关系,即改变电流的大小就可改变电磁转矩的大小;电机的转速与反电势为正比关系,由电机反电势和外加电压的平衡关系可以得出,电机转速的改变可以通过调节外加电压来实现,所以只要改变逆变器的占空比就可实现。图1为无刷直流电动机调速系统原理图。
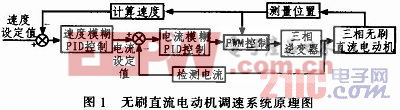
整个控制系统采用分布式控制,上位机为PC机用来输入和显示速度及电流的设定值,并且实现数据的保存及系统的错误报警,采用VC++程序进行界面设计和编写。下位机采用DSP TMS320F2812,该芯片产生输出PWM信号输入IPM模块,该模块包括三相桥式逆变电路和电流反馈电路,从而驱动电机转动,同时DSP接收电流的反馈信号,与电流设定值进行比较。位置传感器检测电机转子位置,输入到DSP中,并且根据计数器测得电机的转速,构成速度反馈。

无刷直流电动机是一个多变量、非线性、强耦合的对象,因而单一的运用PID控制算法不能够得到较为精确的控制结果。而模糊控制是依赖于人的经验进行控制,不需要建立被控对象的精确数学模型,针对非线性和时变的系统具有较好的控制能力。在无刷直流电动机控制系统中把模糊控制和PID相结合,不仅可以得到较快的响应速度和参数变化的鲁棒性,而且可以对系统实现较高精度的控制。
本设计中运用的模糊PID控制器包括两个组成部分:PID控制器和模糊控制器。DSP中断过程中采样获取被控制量的瞬时值与所给的参考值相比较,两者之差e即为偏差信号。偏差较大(|e|≥η)时,采用模糊控制;偏差较小(|e|η)时,采用数字增量式PID控制。这种控制方式既可以利用达到较好的稳态精度,又可以利用模糊控制得到响应的快速性和相应较好的鲁棒性。模糊-PID控制关键是开关阈值η的设定。为了使系统达到最佳效果,开关阈值η可选择经验值,并对其进行在线调整。图3为模糊PID控制器的逻辑关系图。

2.1 模糊控制器的设计
选择电流偏差E和偏差变化率EC的模糊集合为:{NB,NM,NS,ZE,PS,PM,PB},论域为:{-6,-4,-2,0,2,4,6};在一些不确定的状态下可以在线整定模糊控制状态表。表1为控制规则表。

各个变量的隶属函数都选用的是灵敏度较高的三角函数,这样可以更加确保模糊控制器有着较高的灵敏度。
2.2 PID控制算法的设计
在小误差(|e|η)的动态范围内,采取数字增量式PID控制。在工业控制过程中,PID控制可以得到相对满意的控制效果。PID控制算式为:
公式(1)中:u(t)为调节器的输入信号;e(t)为偏差信号,它等于给定量与输出量之差;Kp为比例系数;TI为积分时间常数;TD为微分时间常数。
对公式(1)进行离散化,得到
公式(2)中:u(k)为第k时刻的控制输出。
e(k)——第k次采样时刻输入的偏差值;
Kp——比例系数;
TI——积分时间常数;
TD——微分时间常数;
T——采样周期。
3 系统软件设计
电路中采用DSPTMS320F2812来控制有位置传感器无刷直流电动机的调速控制系统。系统CPU时钟频率采用20 MHz,并且应用PWM频率为20 kHz。通过定时器至周期匹配事件启动ADC转换,使每个PWM周期都对电流进行一次采样,并在A/D转换中断处理程序中对电流进行调节,来控制PWM输出。转子每转过600机械角就触发一次捕捉中断,进行换相操作和速度计算。图4为控制流程图。
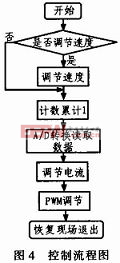
在电流的检测中可以使用旁路电阻来检测相
- 基于DSP的音频会议信号合成算法研究(05-10)
- 基于定点DSP的MP3间频编码算法研究(07-04)
- DSP的并联电力有源滤波器的仿真研究(02-15)
- PCI总线数据采集系统的硬件研究(09-12)
- PIC单片机在温度测量领域的应用及仿真研究(11-23)
- 嵌入式软PLC 的设计与研究(06-27)