基于单片机PIC16C72的分体式空调控制器
前言
汽车车身视觉检测站是用于测量车身关键点的三维空间坐标的大型的专用检测系统。它由机械及定位系统、三维视觉传感器系统、测量控制与接口系统、标定系统以及计算机软件五大部分组成。主要方法采用结构光传感器,经标定系统标定后,通过控制系统选取被测点,采集图像,结合视觉检测算法,求出被测点坐标参数。为进行测量,必须把计算机与传输器联系起来。检测人员应能通过计算机选择测点,使传感器按预先设定的顺序进入测量状态,产生测量用的光条平面,还应能够随时调整测量顺序,并实现对光源的实时控制及图像部分的多用户采集。
控制器局域网CAN(Controller Area Network)是一种具有很高保密性,有效支持分布式控制及实时控制的串行通信网络。CAN总线属于现场总线范畴,与现有的其他总线相比,属于一种分散式、数字化、双向、多站点、多变量的通信系统,具有通信速率高、可靠性强、连接方便、性能价格比高等诸多优点,非常适用于分布式测量系统的数据通信。
本文主要介绍CAN总线在视觉检测站中的研究与应用。
二、视觉检测原理及视觉检测站控制系统
汽车车身视觉检测是目前正在发展的一种新型车身检测方法。其主要原理是利用计算机视觉技术,采用主动三角法获取车身表面点的信息,通过三维视觉算法求取各关键点的坐标,从而完成对车身各顶点位置、挡风玻璃框尺寸、定位孔大小及位置、车门安装处棱边位置及走向等主要参数的测量。
由于汽车车身长宽高都是几m(米)范围,被测点一般都要求在50个以上,网络布线要求300m以上,此外控制系统还应实现对检测站中的机械及定位系统的控制。整个控制系统应具有一定的扩展和适应能力,以便于其他控制单元的加入。
本系统中,针对不同的测量对象,采用不同类型的传感器,总数在50台以上。检测站的控制系统应能对这些传感器的动作进行实时控制,以使其动作相互协调。另外,本测量系统将用于汽车生产线,车身先由吊车放到运放小车上,然后由小车运送到检测站内。吊车及运送小车由直流电机驱动,它们的动作应该既可以通过主机键盘控制,也可以通过检测站中的控制柜直接控制。由于以上各方面的考虑,我们决定采用CAN总线作为本控制网络的通信标准。
二、网络拓扑结构与CAN总线
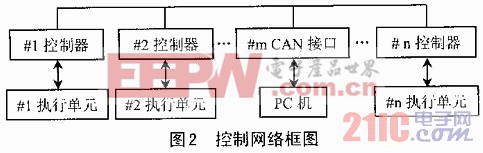
在车身检测站中,对各传感器的数据采集及图像处理等工作主要由CP机完成,为操作方便,对机械部分的控制还应能通过控制台进行。本系统控制节点多(50个以上),可靠性要求高,传统的集中控制方式虽然功能集中、速度较快,但具有硬件结构复杂、现场布线困难、扩展能力低等缺点,所以我们采用单片机作为直接控制单元,用于对传感器的直接控制。每个单片机都是控制网络上的一个节点,各节点直接挂接在数据总线上。PC机和控制框也同样各和为一个节点挂接在总线上,即控制网络应具有多主机控制能力。所以整个网络采用多主机结构,即每一个节点也是一个主机,通过主机间的通信以实现控制要求。为此,我们决定采用总线型的网络拓扑结构,利用CAN灵活方便、支持多主机方式等特点,建立控制网络。不难看出,只要解决好“碰撞”问题,这种方法有结构简单、安全系数高、灵活性好、易于扩展等特点,可以充分满足本检测站的控制要坟。控制网络的结构示意图如图2所示。
现有微机一般都配有两个串行接口,其机械特性和电器特性均符合RS-232C标准。由于RC- 232C标准采用单端电路,极易引入附加电平,并且负载电容不能大于2500pF,传输距离和速度都非常有限;而CAN总线这些方面都远远超过RS- 232C。CAN总线是一个智能化的总线,具有自我管理的功能,能够有效地支持多主机分布式控制,能够良好地解决“碰撞”问题,并具有传输速率高(可达 1Mbps)、传输距离长(可达1000m)、信号的传输精度高(0.01%)等优点。另外,采用循环冗余CRC校验及独特的数据信号表示,使其具有错误判别及自动重发功能,漏检错误概率低于5×10 -11。所以,我们采用了CAN总线。由于CAN总线优良的性能和智能化的管理,保证了整个检测站在恶劣环境下的正常工作。
在信道访问控制上,采用主从式与自由竞争式相结合的放手式通信方法,即以PC主处理机和控制台作为主控制节点,两主控节点的优先级与节点标总符相对应,主控节点命令及信息的送可通过外部设置约定,也可通过自由竞争实现。
在PC 机方面,采用接口卡使PC机跨入总线,其接口电路如图3所示。这里,并行接口采用8255A可编程外围接口芯片,接口逻辑及CAN转换主要由 MC68HC05X16单片机控制。工作中,信息由PC机数据总线送
空调 控制器 分体式 PIC16C72 单片机 基于 相关文章:
- 数字信号处理器TMS320F241在变频空调中的应用(04-28)
- 基于PLC的中央空调系统的设计(12-20)
- PLC在洁净空调行业的应用(12-20)
- 中央空调系统水泵变频节能改造方案(12-19)
- MODBUS转PROFIBUS网关成功应用在中央空调系统(12-16)
- 基于TRIZ的空调换新风装置研究(12-15)