基于ARM的多标签多协议RFID读写器设计
3 系统软件设计
系统软件设计主要实现嵌入式系统移植及防碰撞算法。当在读写器的天线区域中有多个射频标签时,同时到达的信号会产生信道争用的问题。信号互相干扰,发生碰撞。防碰撞技术利用排队论及抗噪声技术来解决这个问题,通过RFID系统一次可以完成对多个射频标签的识别。防碰撞技术的优劣决定了RFID系统的性能。系统软件总体架构包括:扩展层,提供RFID读写器的固件程序,支持多种数据采集模块;设备层,提供RFID系统运行的硬件环境和提供多种物理接口;系统层,提供RFID系统运行的软件环境;中间层,提供开发系统的基础软件框架和应用型RFID中间件;应用层,与业务相关的应用软件。
3.1 防碰撞算法分析
在RFID系统中,评价防碰撞算法优劣的指标有防碰撞速度、准确率、信道利用率、稳定性、安全性和成本等。目前业界推崇的防碰撞方法主要有ALOHA算法(又称应答器控制算法)和二进制树形搜索算法(又称读写器控制算法)。ALOHA防冲突算法由于延迟时间和检测时间是随机分布的,是一种不确定性算法,可分为非时隙、时隙以及自适应ALOHA防冲突算法。其中自适应ALOHA方法的信道利用率最高,它的优点是能显著提高识别速率,缺点是复杂度明显提高。它仅适用于只读型电子标签。二进制树形搜索算法的优点是防冲突能力较强、数据结构和指令简单,缺点是支持的存储容量较小,不适合UID过长的电子标签。这里利用二进制树形搜索算法实现功能。
二进制搜索算法是利用逐步减少发生冲突的位的方法来完成对标签的识别的。该算法的前提条件是读写器必须能够准确地发现发生冲突的位。因此,在该算法中,标签返回信号的编码方式使用了Manchester编码。在Manchester编码方式中,每个信号位中间引入跳变来同时代表不同的数值和同步信息。一个负电平到正电平的跳变代表逻辑“0”,而一个正电平到负电平的跳变则代表逻辑“1”。在数据传输过程中,“没有变化”的状态是不允许的。因此,当一个读写器收到标签的返回信号后,如果发现某些位信号的状态没有发生改变,那么读写器就能够判断这些位一定发生了冲突。Manchester编码原理如图6所示。

图6中有两个标签同时处于读写器的读写范围内。当读写器发送读标签命令时,两个标签都返回它们的识别码给读写器。从图中可以看出,标签1识别码的第5位和第2位的值分别是逻辑“0”和逻辑“1”,而标签2的识别码的第5位和第2位分别是逻辑“1”和逻辑“0”。所以,当读写器收到它们的返回信号时,这两位的状态不会改变,从而读写器知道这两位发生了冲突,由此实现多标签防碰撞。图中的虚线表示标签返回信号中发生冲突的位。
3.2 多协议模式分析
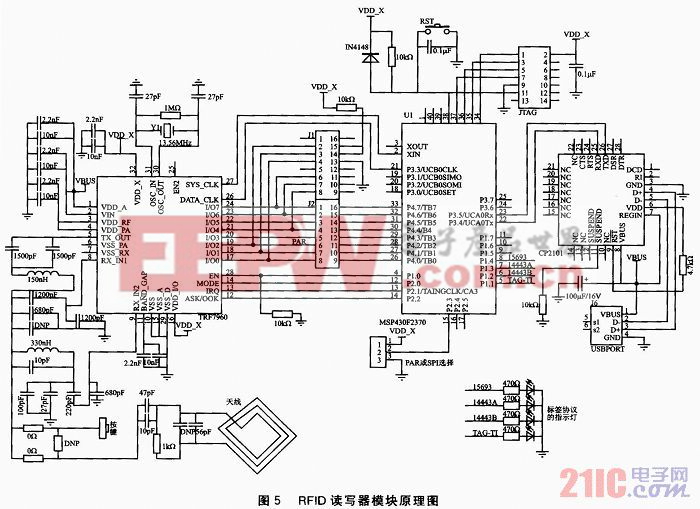
在上电后,首先对TRF7960进行初始化设置。为控制TRF7960实现读/写卡等操作,首先得明确TRF7960的读写时序。起始条件是CLK为高,然后发送8位地址,再在发送时钟的下降沿进行数据发送。当CLK为低时,信号发送上升沿表示操作已经结束。在TRF7960内部有两个主要配置寄存器:芯片状态控制寄存器和ISO控制寄存器,00h和01h分别是它们的地址。芯片状态寄存器可以控制电源模式、RF输出开关等。ISO控制寄存器则负责ISO协议选择,它通过设定参数protocol,选择不同的协议工作方式。例如当protocol为0x01时,为ISO15693协议;当protocol为0x02时,为ISO14443A协议;当protocol为0x03时,为ISO14443B协议。根据指定协议进行相应的读写操作,在设定时间内,若有FIFO中断或发送结束中断产生,则采集数据并保存。这样就实现了多协议、防碰撞多标签RFID读写器系统。
读写器 设计 RFID 协议 ARM 标签 基于 相关文章:
- 基于DSP技术的RFID读写器设计(08-14)
- 基于μC/OS-Ⅱ和GPRS的无线RFID 读写器的研究与开发(07-16)
- 基于FM1702的非接触式读写模块设计(08-29)
- 符合ISO/IEC18000-6C标准的RFID读写器数字基带系统设计(06-04)
- 校园一卡通系统中RFID读写器的设计(09-12)
- 手持式RFID读写器的低功耗设计与测试(06-29)