非对称双核MCU基础知识及核间通信
示。当然,内核也可以定期检查共享RAM的状态。
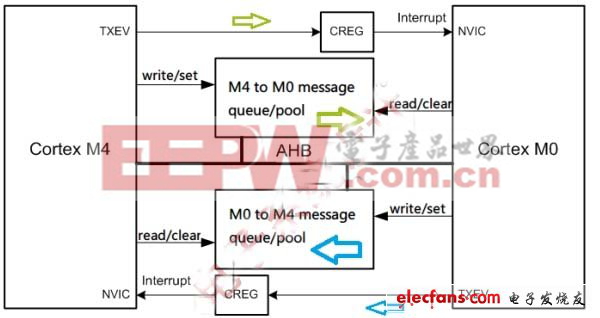
图2:内核间使用共享内存通信模式图
接下来,我们介绍基于消息队列和消息池的控制/状态通信方案。
消息队列:开设两个消息队列,一个用于M4发送消息给M0,另一个则是M0发送消息给M4。两个队列的地址需事先约定好。队列是循环队列,可以使用简单的数组配以读、写下标来实现,也可以使用链表结构来实现。前者实现简单、开销小,但消息只能是定长,不便于携带其它信息,还有,就是必须把数组放置在共享内存区连续的位置,灵活性低。基于链表的实现用指针链接每则消息,每则消息除了公共的链表控制部分外,还可以根据消息类别携带各种各样的附加参数,并且可以由系统软件的内存管理机制灵活分配消息内存,不过,缺点是相对复杂,额外开销大。若涉及动态内存管理,实时性将远不如基于数组的方案。
消息队列有一个缺点,就是消息的串行化处理,它没有优先级的概念。但实际上,我们有实时操作系统(RTOS)及嵌套中断机制的支持,本应实现消息的并发处理。
消息池:消息池在存储结构上其实是简化的基于数组的消息队列——去掉了队列的读、写下标记录器。池中每个元素是一个消息,并且有一个字节指示每个元素的状态——空闲/已处理、新、半处理。当发送方写入消息时,扫描数组以查找空闲位置;当接收方读取消息时,也是扫描数组以查找状态。可见,消息池是基于优先级来处理消息的——小下标的元素优先得到处理。
消息池的可扫描性实现了消息的并发处理,并且可以通过中断上下文和任务上下文分两次“反刍式”处理。在处理消息池的中断服务例程中,先扫描各消息完成第一次处理,执行消息中(如果有的话)对实时性要求较高的部分。如果系统中没有使用RTOS,可以在后台的主循环中,再接下来二次扫描消息池,以完成第二次处理。对于使用了RTOS的系统,可以根据消息的优先级,创建或激活不同优先级的任务,使消息“附身”在这些任务的上下文中得到第二次处理。
消息池的一大缺点就是不宜支持较大数目的待处理消息。如有需要,可以给每则消息添加链表控制字段,我们可以把同一优先级的消息链成一串,从而彻底消除这一局限。
若干重要的细节
内核互斥:伪并行的多任务之间需要互斥访问共享资源,真并行的内核之间更是如此。尤其关键的是,一个内核无法关闭另一个内核的中断,因此还无法通过关中断临界区来保护。唯一能保证的,就是不会出现两个内核同时存取相同的地址。另外,由于架构上的局限,无法使用“自旋锁”来互斥。为此,我们可以通过施加一些编程准则来实现互斥。最简易有效的方法,就是在相同地址上给每个内核分别设置“只读”或“只写”的权限,或者是有条件的读写权限。比如,对于消息队列的读位置,只有接收方可以写,而发送方只能读取来判断队列是否空/满。又如,对于消息池,尽管发送方和接收方对池中的元素状态均可读可写,但有如下的条件:发送方只能把空闲状态改为非空闲;接收方只能把各种非空闲的状态改为空闲。再如,对于链表结构,可以只允许发送方更新各种指针;接收方通过更改链表中元素的状态和触发中断,以指示发送方更新各指针的时机。
内核鉴别:M4向下兼容M0,这使我们可以重用很多的源代码。但是,有时需要鉴别当前正在哪个内核上运行。这有两种方法,分别用于不同场合:如果在编译期间鉴别即可,则可以在编译器设置中,预定义诸如“CORE_M4”和“CORE_M0”的宏,使用C/C++的条件编译来处理;若需要在运行期间区分,可以读取一个名为“CPUID”的寄存器,根据CPUID的值来判定是M4还是M0。
初始化与可执行映像:LPC4350在完成上电复位后,M4开始执行代码,而M0却一直保持在复位状态。这样,我们也可以无视M0的存在,而只按单核MCU来使用。为使用M0,需要让M4为M0准备好开始执行的全部环境,包括寄存器上下文与地址空间等,然后释放M0。当M0处在复位状态时,我们可以通过JTAG发现M0,但是却无法操作它。因此,如果要调试M0的程序,需要先给M4下载适当的映像,使其释放M0才可,不可能在拿到一个空白的芯片后,直接先从M0动手。
尽管M4与M0各有自己的映像,但是我们可以把M0的映像内含于M4的映像中,这样在生产时只需要烧写一次闪存。为了并入M0的映像,工具链通常会提供把映像转换成C数组定义格式的功能。通过这个功能,我们把M0的映像转换成一个C数组的表格,并且把它和M4的源文件一同编译连接,这样一来,M0的映像就
- 基于FPGA的通信系统基带验证平台的设计(06-11)
- 基于DSP的空间光通信APT运动控制箱设计(10-11)
- 嵌入式语音通信系统中VxWorks BSP的设计实现(09-18)
- DSP在通信中的应用(10-12)
- 利用数字信号控制器实现稳健的PLC通信(05-02)
- 短波通信中一种时延设计方法与DSP实现(05-02)