基于单片机的EPS驱动电路设计
1 EPS系统基本结构及工作原理
电动助力转向系统(EPS,Electric Power Steering)是未来转向系统的发展方向。该系统由电动机直接提供转向助力,具有调整简单、装置灵活以及无论在何种工况下都能提供转向助力的特点。EPS最为突出的是该系统可在不更换系统硬件的情况下,通过改变控制器软件的设计,十分方便地调节系统的助力特性,使汽车能在不同车速下获得不同的助力特性,以满足不同工况下驾驶员对路感的要求。
电动助力转向系统(EPS)主要包括传感器、控制器和执行器三大部件。传感器将采集到的信号经过相应处理后输人到控制器,控制器运行内部控制算法,向执行器发出指令,控制执行器的动作,系统结构如图1所示。其工作原理为:在操纵方向盘时,转矩传感器根据输人转向力矩的大小,产生出相应的电压信号,由此电动式动力系统就可以检测出操纵力的大小,同时,根据车速传感器产生的脉冲信号又可测出车速,再控制电动机的电流,形成适当的转向助力。

2 EPS控制系统硬件电路设计
2.1 微控制器的选择
MOTOROLA公司的MC9S12系列单片机是基于16位HCS12 CPU及0.5μm制造工艺的高速、高性能5.0V FLASH微控制器,是根据当前汽车的要求设计出来的一个系列。它使用了锁相环技术或内部倍频技术,使内部总线速度大大高于时钟产生器的频率,在同样速度下所使用的时钟频率较同类单片机低很多,因而高频噪声低,抗干扰能力强,更适合于汽车内部恶劣的环境。设计方案采用MC9S12DP256单片机,其主频高达25 MHz,同时片上还集成了许多标准模块,包括2个异步串行通信口SCI,3个同步串行通信口SPI,8通道输人捕捉/输出比较定时器、2个10位8通道A/D转换模块、1个8通道脉宽调制模块、49个独立数字I/0口(其中20个具有外部中断及唤醒功能)、兼容CAN2.OA/B协议的5个CAN模块以及一个内部IC总线模块;片内拥有256 KB的Flash EEPROM,12KB的RAM及4KB的EEPROM,资源十分丰富。
2.2 硬件电路总体框架
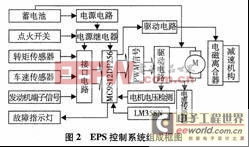
电动助力转向系统的硬件电路主要包括以下模块:MC9S12DP256微控制器、电源电路、信号处理电路、直流电机功率驱动模块、故障诊断模块与显示模块、车速传感器、扭矩传感器、发动机点火信号、电流及电流传感器等接人处理电路,另外还有电磁离合器等,EPS系统的硬件逻辑框架如图2所示。
2.3 电机控制电路设计
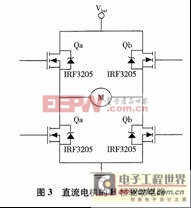
直流电动机是EPS系统的执行元件,电机的控制电路在系统设计中有着特殊的地位。在本系统中采用脉宽调制(PWM)控制H桥电路实施对直流电动机的控制,由4个功率MOSFET组成,如图3所示。采用PWM伺服控制方式,MOSFET功率管的驱动电路简单,工作频率高,可工作在上百千赫的开关状态下。系统采用4个International Reetifier公司生产的IRF3205型MOSFET功率管组成H桥路的4个臂。IRF3205具有8 mΩ导通电阻、功耗小、耐压达55V、最大直流电流110A、满足EPS系统对MOSFET功率管低压(正常工作不超过15V)大电流(额定电流30 A)的要求。
2.3.1 H桥上侧桥臂MOSFET功率管驱动电路设计
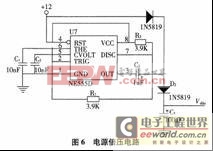
上侧桥臂的MOSFET功率管驱动电路如图4所示,其中Qa/Qb为上侧桥臂的功率MOSFET a管或b管,vdble为倍压电源电路提供的电源电压。当MOSFET的控制信号a(b)为高电平时,Q1和Q2导通,电源通过Q2,D1以及R5与C1的并联电路向Qa充电,直至Qa完全导通,Q3截止。当Qa导通时,忽略Qa的漏极和源极之间的电压降,则Qa的源极电压等于蓄电池电源电压。此时,Qa的栅-源极电压降VGS=( Vdble-VCE-VF-Vbat),其中VCE为2N2907的集一射极饱和导通电压,其典型值为0.4V,VF为D1的正向导通压降,其典型值为0.34V,Vbat为蓄电池电压。为保证器件可靠导通,降低器件的直流导通损耗,VGS不低于l0V。因此需设计高效的倍压电源电路,以保证Vdble的值足够大,满足功率MOSFET的驱动要求。如果蓄电池电压为12V时,Vdble≥12V+0.34V+0.4V+10V=22.74V。
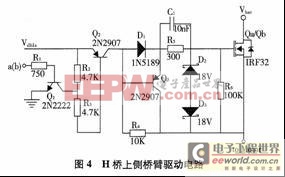
当MOSFET的控制信号a(b)管为低电平时,Q1和Q2均截止,Q3导通,Qa的栅-源极电压通过R5与C1的并联电路及Q3迅速释放,直至Qa关断。Qa关断时,连接其栅-源之间的电阻R6使其栅-源电压为零。IRF3205的导通门限电压为2~4V,OV的栅-源极电压能够使其关断。
2.3.2 下侧桥臂的功率MOSFET管驱动电路
下侧桥臂的功率MOSFET驱动电路如图5所示,其中Qc/Qd为下侧桥臂的功率MOSFET的c管或d管。当MOSFET的控制信号c(d)为高电平时,Q1导通,Q2截止,Q1的栅极电压通过R3与C1组成的并联电路、D1及Q1迅速释放,Qc/Qd关断。
当MOSFET的控制信号c(d)低电平时, Q1截止,Q2导通,电源通过Q2以及R3与C,组成的并联电路对Qc
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)