基于人脸识别技术的智能系统研究与开发
1研究背景
生物识别技术是目前最为方便与安全的识别系统。生物识别是依靠人体的身体特征来进行身份验证的一种解决方案。由于与传统的生物识别技术相比,人脸识别因具有更为简便、准确、经济及可扩展性良好等众多优势而普遍为人们所看好,被广泛应用于安全验证、监控、控制等各个方面。但到目前为止,能够满足人们需求的理想系统尚未出现[1]。
根据FERET'97 测试报告[2],目前的人脸识别算法对于不同的摄像机、不同的光照条件和年龄变化的适应能力非常差。FRVT'2000评测[3]结果表明,人脸识别系统的性能与FERET'97的测试相比有了一定的进步,但其识别性能对各种条件,如光照、老化、距离、姿态等,仍然离人们的期望值较远。
2问题的提出
本文仅考虑单人正面静态灰度图像,着重考虑人脸图像的检测和定位,不考虑头部的俯仰、旋转以及穿戴、遮蔽的情况,而且头部的倾斜不超过15°。
本文的研究工作主要是提出了结合人脸模板和人脸特征进行人脸检测的方法,对现有的人脸检测与定位的方法提出了改进,进而提取脸部特征,并在此基础上实现了一个智能识别系统演示软件。本文所采用的方法,主要是基于参数化的椭圆型人脸模板与基于眼睛及嘴巴几何特征相结合的人脸定位方法,以及根据其眼睛、鼻部及嘴部的几何特征参数,对实验人脸库进行监督下的分类和统计的人脸识别方法。所采用的人脸数据库是BioID人脸库。
3基于人脸识别技术的智能系统设计方案
人脸自动识别系统包括下列主要技术环节[4],首先是人脸检测和定位,即从输入图像中找到人脸及人脸存在的位置,并将人脸从背景中分割出来,然后才是对归一化的人脸图像进行特征提取与识别。这两个环节的研究独立性很强。由于在很多特定情况下,人脸检测与定位的工作比较简单,因此“特征提取与识别”环节得到了更为广泛和深入的研究;而近几年来随着人们越来越关心各种复杂情形下的人脸自动识别系统,人脸检测与定位才得到了较多的重视。
评价一个人脸自动识别系统的标准,一个是误识率即将某人错识别为其他人,另一个是虚警率即将其他人识别为这个人。这二者之间是存在矛盾的,所以在实际问题中往往需要进行某种折衷。这一点同样适用于特征提取与识别环节,但是对于人脸检测与定位,我们一般则要求误识率要尽可能低,因为这样才可以保证所要识别的人不会在这一步就丢失。
常用的人脸识别实验库以美国军方的FERET 库最为权威。另外如MIT、ORL 等库也可以用来验证算法在某些方面的能力。目前尚没有专门测试人脸检测和定位算法的图像库。
4基于人脸形状特征的精确定位方法
4.1 人脸特征的检测
特征检测是人脸识别智能系统中的关键环节,因为眼睛、鼻子和嘴巴等特征集中了人脸的人部分信息。对于人脸建模来说,不仅要检测出这些特征,而且要准确地加以定位。
假设人脸的姿态比较正,那么人脸上的特征是水平边缘集中的区域。我们可以在低分辨率下提取水平边缘,然后找到人脸区域内富含这些边缘的连通区,作为人脸特征的候选区域。这些区域的位置和大小并不准确,因为边缘检测本身容易出现位置偏移,连通区的大小也随阈值而变化。所以还需要进一步修正上面的结果。对正面的人脸来说,眼睛、嘴巴等特征和整个人脸的尺寸之间存在先验的约束关系,这就是人脸结构的恒常性,因此我们利用这些约束关系确定特征区域的大小。
4.2 双眼和嘴巴的定位
可以充分利用先验知识,把眼睛和嘴巴表示为分段多项式曲线,然后用变形模板得到准确的轮廓。眼睛轮廓的模型如图1所示,由四段二次曲线组成,曲线的参数有8个:上半眼的中心(x0,y0)、连接内外眼角的直线的倾角θ、上下半眼的高度h1和h2、内眼角到上半眼中心的距离wl,外眼角到上半眼中心的距离w2,内眼角到下半眼中心的距离w3。
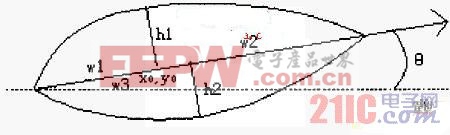
图1 眼睛轮廓模型
评价函数的选择是关键。眼睛本身不具有—致的颜色信息,而边缘信息比较丰富。因此,先对图像进行边缘提取,然后作适当尺度的闭运算,就可以使眼睛内部形成单一的高亮度区。在处理过的图像中,眼睛内部是高亮度区,外部是低亮度区。因此可以定义评价函数如式(1)所示。其中D表示眼睛区域, 表示眼睛轮廓之外的带状区域, 表示轮廓之内的带状区域。根据4段曲线表达式得到的眼睛区域可以初始化眼睛的轮廓,然后用最陡下降法迭代直至该轮廓收敛。
 (1)
(1)
嘴巴轮廓的模型如图2所示。由两段四次曲线组成,曲线的参数有7个:嘴巴的中心(x0,y0)、连接两嘴角的直线倾角θ、上下半嘴的高度h1和h2、嘴角到嘴巴中心的距离w,以及上下半嘴的四次项系数q
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)