基于68HC908MR16单片机的光伏正弦波逆变电源介绍
当偏差较大时,比例系数和积分系数也较大,当偏差较小时比例系数和积分系数也较小,从而大大减少了超调量,很容易使系统稳定,完全消除了积分饱和现象,也增强了系统的适应能力。
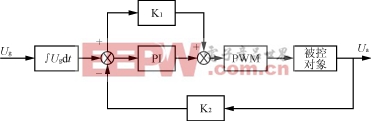
图3 系统控制框图
3 串行通信
为了增强系统适应不同环境的能力,有必要对系统进行监控监测及对参数进行修改调节,本系统采用串行通信技术同外界键盘监控系统进行通信。程序上采用查询方式,周期性地向外界发送检测的数据,检测的数据包括太阳电池电压、充电电流、蓄电池电压、直流侧电流、输出电压、输出电流、散热器温度等,当发生故障时优先发送故障信号,当需要修改参数时就接收数据并修改相应参数,并使用校验和校验的方法检验数据通信的准确性。硬件采用MAXIM公司的MAX485作为接口芯片使其工作于半双工模式,同时本系统采用光耦隔离的办法以增强系统抗干扰能力,提高可靠性。
4 系统的软件设计
本系统软件采用模块化设计,包括初始化模块、保护模块、调节器模块、通信模块、中断程序模块等,除中断模块外其余模块都放在主程序中进行,主程序框图见图4。
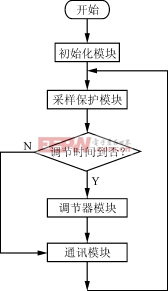
图4 主程序流程图
初始化模块主要完成系统的初始化、各变量单元、各寄存器单元赋初值。
保护模块根据电压电流采样值进行故障判断,并在故障发生时封锁PWM的输出。保护包括蓄电池欠压、蓄电池过压、系统过载、过热保护等,其中蓄电池欠压、过压保护能够实现自恢复,即在检测到蓄电池电压又恢复正常时,系统重新软启动并恢复正常工作。过流保护由于需要快速反应故采用硬件保护,当过流发生时就立即封锁全部PWM输出,也立即封锁全部驱动电路,只有重新复位时才能恢复工作,软件可判断出是否发生过流保护。
调节器模块完成对系统输出电压稳压的PI调节,使输出电压稳定在220V,同时软启动也放在其中。其入口参数为软启动输出,出口参数M送到中断模块中参与PWM脉宽的计算。通过实时调节该参数的值就能改变脉宽值从而使输出跟随给定。
中断程序模块完成SPWM波形的发出、交流电压、交流电流参数的采样。中断的入口参数为PI调节器的输出参数M,该参数参与脉宽的计算即PVALX(H:L)值的计算,从而改变了占空比也即调节了输出电压。按照SPWM的规则2采样的方法,结合初始化中对PWMMC的设定得脉宽的实时计算公式为
正半周期:
PVALX(H:L)=PMOD(H:L)/2+M×SIN(PTR)
负半周期:
PVALX(H:L)=PMOD(H:L)/2-M×SIN(PTR)
其中PTR为正弦表指针,SIN(PTR)为对应PTR指针的正弦值。
5 结语
按照以上思想制成样机,最后能得到比较标准的220V、50Hz正弦电压,软启动也很平稳,其频率误差≤0.1%,输出电压误差≤0.5%。由于采用10kHz的载波频率,在变压器原边得到20kHz高频信号,无噪声。在上述控制方式下,能保证系统在突然加载或减载时输出电压快速地保持稳定。并且与外界键盘监控系统的串行通信良好,有较强的实用性和可靠性。其空载和负载时的输出电压波形如图5和图6所示。

图5 空载时输出电压波形
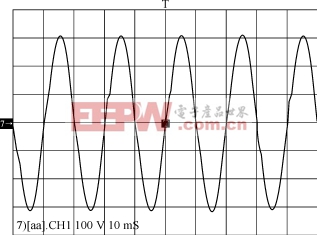
图6 负载时输出电压波形
逆变电源 介绍 伏正弦 单片机 68HC908MR16 基于 相关文章:
- 基于DSP的逆变电源控制系统设计(08-11)
- 基于DSP无差拍控制的逆变电源研究(07-31)
- 基于DSP的逆变电源控制系统研究(04-28)
- 基于DSP的弧焊逆变电源数字化控制系统(09-14)
- 基于DSP的风力发电逆变电源的研究(03-06)
- 基于ARM7和DSP的逆变电源设计电路(01-08)