基于嵌入式Linux的ARM/DSP多机I2C通信
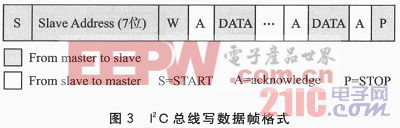
主模式下读数据,是指每次从指定的位置读取一个或多个字节数据。主机首先向从机发送启动信号,然后发送7位从机地址和1位读标志位,等待从机应答。当收到从机的应答信号后,主机准备接收从机发送的数据,接收完成后发送一个应答信号,如此直到数据接收完成,主机发送一个停止信号。图4为I2C总线读数据帧格式。
2.1.2 Linux下I2C总线驱动程序概述
Linux系统的I2C总线驱动采用体系化结构设计,包括I2C总线适配器驱动和I2C总线设备驱动。总线驱动实现对I2C总线适配器(S3C2440的I2C总线模块)的控制,设备驱动实现对具体设备(F28015的I2C总线模块)的读写控制。图5为总体驱动框架,可以分为三个层次:
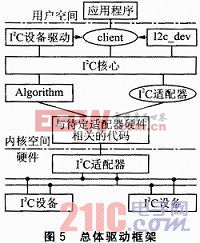
①I2C框架。内核中i2c.h和i2c-core.c为I2C总线框架的主体,提供了核心数据结构的定义、I2C总线适配器驱动和设备驱动的注册、注销管理、I2C总线通信方法上层的、与具体适配器无关的代码、检测设备地址的上层代码等。i2c-dev.c用于创建I2C总线适配器的设备节点,提供I2C总线设备访问方法等。
②I2C总线适配器驱动。定义描述具体I2C总线适配器的数据结构,实现在具体I2C总线适配器上的I2C总线通信方法。
③I2C总线设备驱动。定义描述具体设备的数据结构,借助I2C总线框架的相关函数实现设备的注册,并为用户提供上层应用程序编程接口。
Linux的I2C总线驱动框架中的主要数据结构包括:i2c_driver、i2c_client、i2c_adapter和i2c_algorithm,它们被定义在内核中的i2c.h头文件中。i2c_adapter对应于物理上的一个适配器,而i2c_algorithm对应一套通信方法,用来为适配器提供通信函数。i2c_algori thm中的关键函数master_xfei()用于产生I2C总线访问周期需要的信号,以i2c_msg(即I2C总线消息)为单位。该结构体原型如下: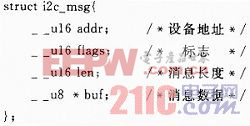
i2c_driver对应一套驱动方法,是用于辅助作用的数据结构。i2c_client对应于真实的物理设备,每个I2C总线设备都需要一个i2c_clie nt来描述。i2c_adapter和i2c_client的关系与I2C总线硬件体系中适配器和设备关系一致,即i2c_client依附于i2c_adapter。
在Linux内核源代码中drivers目录下的i2c_dev.c文件,是通用的I2C总线设备驱动文件,为应用程序提供open()、write()、read()、ioctl()和close()等操作接口来访问设备。应用层可以借用这些接口访问挂接在适配器上的I2C总线设备的存储空间或寄存器,并控制I2C总线设备的工作方式。
2.1.3 S3C2440的I2C总线驱动及设备驱动
S3C2440内部的I2C总线控制器通过4个寄存器实现对通信的控制,分别是I2C控制寄存器(I2CCON)、I2C状态寄存器(I2CSTAT)、I2C收发数据移位寄存器(I2CDS)、I2C地址寄存器(I2CADD)。
按照Linux中I2C总线框架要求,S3C2440的I2C总线驱动设计主要完成以下工作:设计i2c_adapter_s3c_init()模板加载函数和对应于i2c_adapter_s3c_exit()模板卸载函数;设计i2c_adapter_s3c_xfer()模板S3C2440适配器通信方法函数。
i2c_adapter_s3c_init()通过注册s3c2440_i2c_driver结构体实现总线驱动的平台注册,s3c2440_i2c_driver结构体包含了具体适配器的probe()函数、remove()函数、resume()函数指针等信息。代码如下: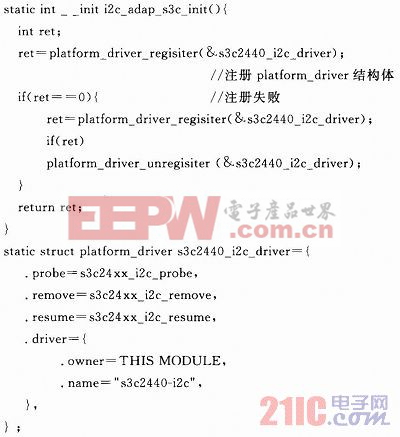
完成了S3C2440的I2C总线适配器驱动注册后,就可以将具体设备驱动注册到该总线平台上,实现I2C总线数据通信。i2c_dev.c文件是内核源码提供的通用I2C总线设备驱动文件,针对每个I2C总线适配器生成一个主设备号为89的设备文件,设备驱动模块加载流程如图6所示。完成加载后,驱动提供i2cdev_read()、i2cdev_write()、i2cdev_ioctl()函数来对应用户空间的read()、write()、ioctl()函数,供用户使用。用户通过这些接口函数实现I2C总线数据的读写功能。

2.2 DSP数据接收中断程序设计
通过配置F28015的I2C模块寄存器,设置I2C模块为从工作方式,同时利用I2C总线中断响应程序实现对总线上数据的接收和发送,进而完成数据通信。F28015产生了I2C总线中断后,就执行中断服务程序,图7为I2C总线中断服务程序流程。

中断服务程序通过查询状态寄存器(I2CSTR)标志位,得出中断类型码,然后调用相应的子程序,完成数据接收发送。代码如下:
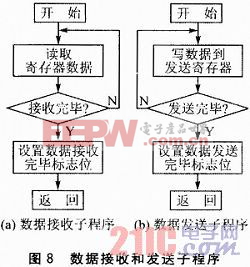
F28015中的数据接收子程序和数据发送子程序是在I2C总线的中断服务程序中根据不同的状态码进行调用,它们是整个通信程序的核心部分。数据接收子程序和数据发送子程序的流程如图8所示。
通过NFS文件系统将编译成模块的I2C的总线驱动和设备驱动加载到运行Linux操作系统的S3C2440平台上(先加载总线驱动),再将F28015的测试程序烧写到RAM中。运行F28015等待I2C总线上的数据,再执行Linux系统中的I2C总线测试程序。测试结果显示,芯片通过I2C总线接口完成了数据通信,具有良好的实时性和可靠性。
4 结论
该设计利用I2C总线实现了ARM9微控制器与DSP芯片间实时可靠的数据通信。ARM9微榨制器结合Linux操作系统作为上层控制核心,DSP芯片实现下层控制算法,可充分发挥ARM9微控制器在数据采集和任务管理等方面的优势以及DSP芯片在算法实现和底层控制的长处。
多机 I2C 通信 DSP ARM 嵌入式 Linux 基于 相关文章:
- RS-232隔离器可实现多路RS232的多机通信(12-16)
- RS232转RS485串口远距离多机通信(12-16)
- RS485主从式多机通讯协议(12-14)
- avr单片机串口多机通讯及实例(12-03)
- 实现单片机与PC机多机通讯的程序(11-30)
- RS-485的多机通信程序(主机端)(11-30)