采用SPMC75F2313A的直流伺服驱动器
直流伺服驱动器凭借其优异的驱动性能,在工业、医疗、国防等领域有着广泛应用。典型的直流伺服驱动器的结构如图1-1所示。整个系统是由电流环、速度环和位置环构成的多环控制系统。传统的伺服驱动器使用运放为核心的模拟电路构成,其有结构复杂、参数调整不易和系统性能易受环境影响等缺点。随着微处理器技术、模拟数字接口技术和功率半导体技术的长足发展,现代的直流伺服驱动器普遍采用由微处理器为核心的数字控制系统。以微处理器为核心的伺服驱动器不但可以方便实现以前用模拟电路无法实现的控制算法,并且有着结构简单、参数调整方便、系统性能对环境参数不敏感等优点。同时,数字控制系统还可以充分利用成熟的网络连接技术,实现多机并行运行。
本文介绍的是基于SPMC75F2313A和MOSFET功率管(IRF540)实现的直流伺服驱动器方案。
2芯片特性简介
SPMC75F2313A是μ’nSP™系列产品的一个新成员,是凌阳科技新推出的专用于电机驱动的16位微控制器。其拥有性能出色定时器和PWM信号发生器。可以方便的实现各种电机伺服驱动方案。
SPMC75F2313A在4.5V~5.5V工作电压范围内的工作速度范围为0~24MHz,拥有2K字SRAM和32K字闪存ROM;最多33个可编程的多功能I/O端口;4个通用16位定时器/计数器(其中有一个电机驱动专用PWM波形发生器,一个位置侦测接口定时器),且每个定时器均有PWM发生的事件捕获功能;2个专用于定时可编程周期定时器;可编程看门狗;低电压复位/监测功能;8通道10位模-数转换。在这些硬件外设的支持下SPMC75F2313A在电机控制领域有相当优秀的表现。
SPMC75F2313A的特性如下:
| 1. 高性能的16位CPU内核 a) 凌阳16位u’nSP处理器(ISA 1.2) b) 片内基于锁相环的时钟发生模块 c) 最高系统频率Fck:24MHz 2. 片内存储器 a) 32K Words (32K×16bit) Flash b) 2K Words (2K×16bit) SRAM 3. 工作温度: -40 ℃~85 ℃ 4. 10位ADC模块 a) 可编程转换速率,最大转换速率100Ksps b) 6个外部输入通道 c) 可与PDC或MCP等定时器联动,实现电机控制中的电参量测量 5. 串行通讯接口 a) 通用异步串行通讯接口(UART) b) 标准外围接口(SPI) 6. 33(LQFP44)/31(SDIP42)个通用输入输出脚 7. 可编程看门狗定时器 8. 内嵌在线仿真电路ICE接口:可实现在线仿真、调试和下载 9. 通用16位定时/计数器 | 1. PDC定时器 a) 两个PDC定时器:PDC0和PDC1 b) 可同时处理三路捕获输入 c) 可产生三路PWM输出(中心对称或边沿方式) d) BLDC驱动的专用位置侦测接口 e) 两相增量码盘接口,支持四种工作模式,拥有四倍频电路 2. MCP定时器 a) 一个MCP定时器:MCP4 b) 能产生三相六路可编程的PWM波形,如三相SPWM、SVPWM等 c) 提供PWM占空比值同步载入逻辑 d) 可选择与PDC的位置侦测变化同步 e) 可编程的硬件死区插入功能,死区时间可设定 f) 可编程的错误和过载保护逻辑 3. TPM定时器 a) 一个TPM定时器:TPM2 b) 可同时处理二路捕获输入 c) 可产生二路PWM输出(中心对称或边沿方式) 4. 两个CMT定时器 |
3系统总体方案介绍
本伺服驱动器主要由凌阳SPMC75F2313A、由IRF540组成的功率全桥和各种接口模块组成,其结构框图如图 3-1所示。驱动器使用带电流环的位置伺服结构,其中位置伺服环可根据需要选择是否接入系统。驱动器使用20KHz的双极性PWM,以保证系统良好的动态性能。
系统工作流程:
SPMC75F2313A接受来自各种控制接口的控制信息,并转换成相应的电机控制信息。SPMC75F2313A内部的电机驱动模块依据控制信息和电机本身反馈的状态信息产生PWM驱动信号,经MOSFET功率放大后驱动电机运行。同时,内建的保护电路随时监示系统状态,一旦系统异常,保护电路会立即动作,保护整个系统不会异常情况而损坏,同时提醒用户检查。
4系统硬件设计
系统驱动部分的电路原理图如图 4-1。电路由主控MCU核心(SPMC75F2313A)、功率驱动电路(IRF540组成的功率桥)、MOSFET驱动保护电路、霍尔电流传感电路、增量编码器接口电路和DC/DC电源变换电路几部分构成。其中SPMC75F2313A主要实现电机驱动所需PWM信号的产生、系统控制、人机接口等控制功能。
驱动电机所需的四路PWM信号由SPMC75F2313A内部的MCP定时器产生,信号由芯片的IOC端口输出,经栅极驱动电路后驱动功率MOSFET(IRF540)。PWM信号经IRF540功率合成后输出驱动直流伺服电机。
霍尔电流传感器提供实时的电机工作电流信号,电流信号经SPMC75F2313A内部的ADC模块AD转换后供给电机驱动模块使用。
增量编码器接口使用SPMC75F2313A内部的PDC定时器实现,为SPMC75F2313A内部固化的电机驱动模块提供位置和速度信息,从而完成系统的速度和位置控制。
系统保护电路由SPMC75F2313A内部MCP定时器的硬件保护逻辑和外部保护电路两部分组成。保护电路会时刻监测系统工作状态,一旦系统异常(过压、欠压、过流、过载等情况),保护电路会立时拉低MCP定时器的错误保护输入端(IOC9),SPMC75F2313A内部的驱动硬件会立即禁止所有PWM输出(变为高阻态),关断所有功率器件,确保系统不会因这些异常情况而损坏。同时申请中断,请求CPU对相应的事件进行处理。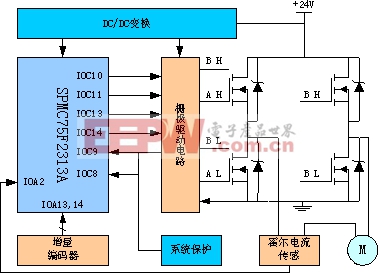
驱动器 伺服 直流 SPMC75F2313A 采用 相关文章:
- PICCl8编译器命令行驱动及其应用(02-11)
- DSP控制器应用的4个误解(04-23)
- 基于DSP的传感器制备系统的设计方式简述(07-20)
- 如何提升数字控制电源性能?MOSFET驱动器有办法(10-25)
- Σ-Δ调制器提高运动控制效率设计方案(12-20)
- 基于办公自动化设备的高能效步进电机驱动器方案(12-20)