基于SPMC75F2413A的直流变频洗衣机的设计方法
洗衣机是一种在家庭中不可缺少的家用电器,发展非常快,全自动式洗衣机因使用方便得到大家的青睐,全自动即进水、洗涤、漂洗、甩干等一系列过程自动完成,控制器通常设有几种洗涤程序,对不同的衣物可供用户选择。变频控制依其高性能、节能等优点在洗衣机的控制中得到广泛应用,下面介绍采用凌阳科技公司的SPMC75F2413A和SPCE061A单片机来设计的直流变频洗衣机的控制系统。
2芯片特性简介
SPMC75F2413A是凌阳科技公司开发的用于变频驱动的嵌入式16位微控制器,适用于变频电动机驱动、电源、家电和车内风扇控制系统等领域。
特性包括:
◆凌阳16位u’nSP处理器(ISA 1.2)
◆工作电压:4.5V~5.5V
◆最高运行速度:24MHz
◆工作温度: -40 ℃~85 ℃
◆芯片内存储器:
32KW (32K×16) Flash
2KW (2K×16) SRAM
◆基于时钟发生模块的锁相环电路
◆看门狗定时器
◆10位模/数转换器
8通道输入
10us (100kHz)转换时间
◆串行通讯接口
通用异步串行通讯接口(UART)
标准外围接口(SPI)
◆64(QFP80)/53(QFP64、SDIP64)个通用输入输出管脚
◆电源管理
2种低功耗模式:Wait/Standby
每个外设都可以独立的供电
◆两个比较匹配定时器
◆5个16位通用定时器
2个用于驱动电机的脉宽调制输出(互补的3相6路脉宽调制输出)
2个用于速度捕获
1个用于速度反馈环
◆中心(center)或边沿(edge)脉宽调制输出
◆通过外部错误保护管脚进行脉宽调制输出保护
◆可编程的死区控制(Dead time control)
◆脉宽调制服务和错误中断发生
◆具备驱动交流感应电机和直流无刷电机的能力
◆内嵌在线仿真功能(ICE)
3系统总体方案介绍
整个系统主要由两部分组成:由SPMC75F2413A控制的DMC控制板和由SPCE061A控制的PANEL板,两者之间的连接系统方块图如图3-1所示。
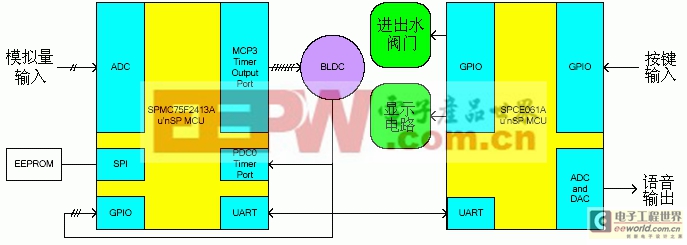
图3-1 变频洗衣机系统组成框图
PANEL控制器采用16 位SPCE061A控制器,主要完成的功能有:按键扫瞄、状态显示与通讯。洗衣机的控制通过按键输入来选择操作模式,并可设定选择水量、预约时间,详细设定洗衣、洗净及脱水的参数;电源按键钮为起始与驱动控制电路板的连接,起动或暂停键为运转洗衣机或暂停。运转过程中的剩余时间透过7 段显示器来显示。
DMC 控制器采用16 位SPMC75F2413A 单芯片控制器,主要完成的功能有:侦测马达转子的位置讯号,以120 度方波驱动PWM 方式驱动直流无刷马达。
4系统硬件设计
系统控制包括DMC控制板和PANEL控制板两部分,下面主要介绍DMC控制板硬件设计。
4.1 电源电路
图4-1为EMI 电源滤波器与单相全桥整流器电路,AC 电源输入接头为CON1,电压为220VAC,电源输入端通过突波吸收器ZNR3以避免过大的电压突波损坏器件,C8 与C12 串联后连接至接地点,通常也可以连接至机壳。透过全桥整流器DB1整流、C13 滤波后可得到输出直流电压。
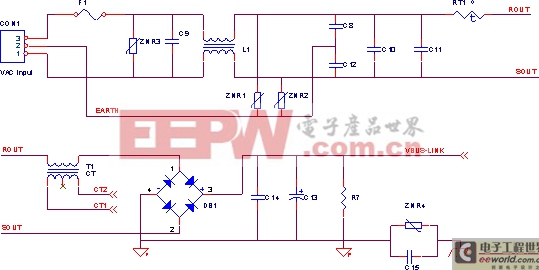
图4-1 EMI 电源滤波器 图4-2为DC/DC电源供应电路,电源供应器的输出侧电源为P+18V 与+12V。P+18V 电源输出后分别透过IC21与IC22 产生P+15V 与P+5V,以供给IPM 功率模块的工作电压。而+12V 经线性稳压器IC20产生+5V 电源供给SPMC75F2413A 等数字电路的工作电压。

图4-2 DC/DC电源供应电路
4.2MCU控制电路
图4-3为MCU控制电路,此部分的电路主要是以u’nSP SPMC75F2413A 微控制器为主,CON5连接在线调试、仿真器ICE。

图4-3 MCU控制电路
4.3IPM马达驱动电路
图4-4为IPM马达驱动电路,因为驱动的马达为三相变频,因此一般来说微控制器需具备能够输出6 个PWM 讯号的能力,SPMC75F2413A 在芯片硬件上可由MCP 与PDC 定时器模块完成此功能。IPM 模块内集成了驱动回路与过电流检测电路,MCU 的PWM 输出讯号通过光耦送到IPM 模块,但在实际应用上需考虑到对MCU 的保护以及与快速地对IPM 模块产生高阻抗讯号,光耦的正常驱动,因此在电路中加入了IC12 的缓冲电路;过电流回馈讯号经光耦合器后连接到FTINx 的输入脚,以求能够对IPM 模块快速地保护。D5、D6、D7、C37、C40 与C43 产生组成自举电路提供IPM上臂开关的驱动信号。

图4-4 IPM马达驱动电路
SPMC75F2413A 直流变频 洗衣机 相关文章:
- 使用SPMC75F2413A设计的通用变频器(06-07)
- 基于SPMC75F2413A单片机的直流变频洗衣机的设计(05-29)
- 基于智能功率模组芯片PS21865A和SPMC75F2413A的AC变频空调方案实现(05-02)
- 基于SPMC75F2413A单片机在AC变频空调的应用设计(12-31)
- 采用SPMC75F2413A实现交流变频驱动控制的应用(10-21)
- 利用SPMC75F2413A来开发直流变频洗衣机(10-20)