监控软件设备驱动程序编制原理与实现
时间:05-15
来源:互联网
点击:
仪表类
智能仪表类包括各种智能仪表和智能模块。它们必须通过与计算机的串口(通常叫com口)连接才能与计算机进行数据通信。串口通信原理图如图3所示:
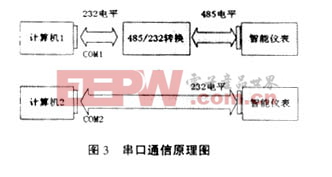
设备通过计算机的串口,采用各种通信协议与计算机进行通信。必要的通信参数有波特率大小,数据位长度,停止位位数,有无奇偶校验等。对于与串口通信有关的设备,必须调用一个串口父设备,子设备只负责按通信协议形成设备命令,并把命令放到一个固定的字节数组中,然后子设备调用父设备的几个通信函数,包括

其中输入输出数据或命令都放在数组OutPutByte()中。串口父设备才真正与计算机的串口打交道。编制串口子设备驱动程序的原理和格式与编制独立板卡类设备驱动程序的原理和格式是一样的。只不过独立板卡类设备驱动程序调用的是设备核心函数;而串口子设备驱动程序调用的是串口父设备通信函数。
3接口软件编程框架
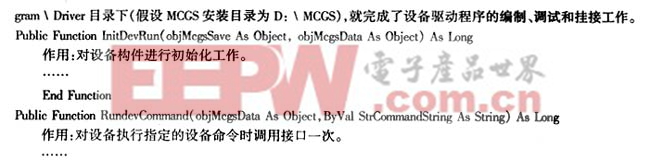
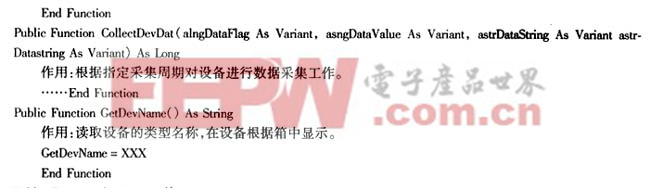
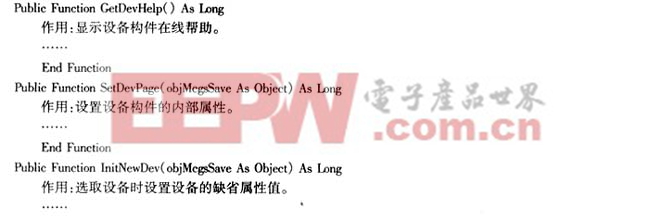
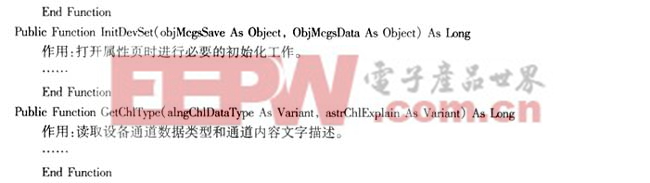
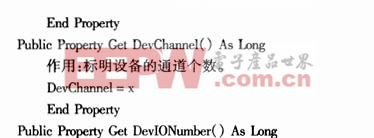
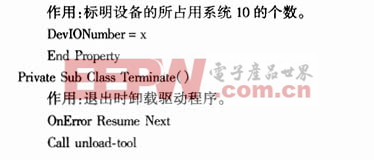
以下是MCGS监控软件设备驱动程序编程框架。该程序框架用VisualBasic语言编制,对独立板卡类和智能仪表类设备都适用。用户在具体编程时只要将程序框架中省略部分补充完整即可。程序编制完成之后,再对其进行“不兼容”和“二进制兼容”两次编译。将编译后得到的“*.dll”文件拷贝到D:\MCGS\Pro-

4结束语
不同的监控软件的设备驱动程序的编写可能会有所不同。比如,不同监控软件提供的接口函数可能不同,支持的编程语言可能不同,但基本编程思路是一样的。另外,有的监控软件开发商为了简化设备驱动程序的编制工作,还提供了样例程序,用户只须对相应的样例程序进行移植和修改就可以很快地编制出一个新的设备驱动程序。
- 嵌入式编程需注意的Cache机制及其原理(05-25)
- 通信系统原理技术与DSP实验平台的研制(06-06)
- Linux 环境下USB 的原理、驱动和配置(06-06)
- 基于FPGA的原型板原理图的验证(06-05)
- CAN总线原理介绍(12-16)
- 直流无刷电动机原理与控制(12-15)