基于单片机的激光共聚焦扫描系统的研究
摘要:作为一种具有较高横向分辨率和纵向分辨率的显微仪器,激光共聚焦扫描显微镜在各个领域有较大发展 文中介绍了激光共聚焦光学扫描的非线性问题,通过选取合适的振镜以及驱动控制系统消除非线性,最后完成扫描驱动系统的软件设计。
关键词:单片机;共聚焦;扫描振镜
通过光学特性在生物组织病变前后所体现出的特征变化米检测并判断生物组织发生病变种类以及病变程度是医学界一个研究热点。激光共聚焦扫描显微镜不仅具有较高的平面分辨率,而且具有较高的深度分辨率,使其能够对佯品进行光学断层扫捕成像。
1 共聚焦扫描显微镜原理及系统结构
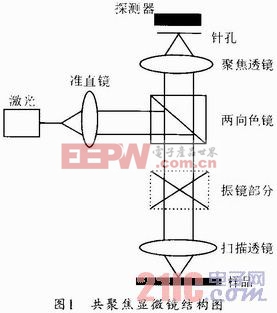
激光共焦扫描显微成像技术是采用共轭焦点技术,如图1所示。其工作原理为激光光源发出的激光通过准直系统入射到两向色镜上,经过扫描系统入射到扫捕透镜和透镜组上,进入光纤束聚焦于被测样品。样品反射和后向散射的光经过光纤进入到光电探测器。光电探测器转换光信号后经过信号处理部分进入计算机进行处理、成像,在整个成像过程中,只有来自样品焦平面上的光线能在探测器的光纤连接处正确聚焦,被探测器接收。而其他处于样品焦平面之外的光则不能进入探测器。
2 扫描系统
激光共聚焦扫描一个很重要的部分便是扫描控制技术,本系统采用的是光学扫描成像技术。
本激光高速扫描系统中采用单片机作为系统控制的核心,用以实现对扫描系统的控制。通过单片机控制振镜的偏转实现光学扫描,因此只有实现振镜良好控制才能实现激光高速扫描。
2.1 单片机控制系统
该激光扫描控制系统采用单片机AT89S51处理器为核心,如图2所示,整个系统包括快速振镜驱动及时钟部分、慢速振镜部分、电平转换部分、D/A转换、信号探测及处理部分、数据采集部分。
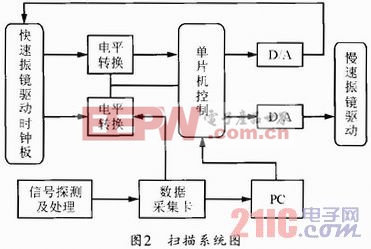
系统通过电平转换模块将快速振镜扫描时钟板输出的像素使能信号(RS232电平)转换成单片机能接收的TTL电平接入单片机的外部中断和外部计数端口,单片机对像素使能信号加以计数,通过外部中断服务程序将像素使能信号的计数值读出,并通过D/A转换部分将其转换成模拟信号,用来驱动慢速振镜的偏转。同时,电平转换模块将快速振镜扫描时钟板输出的像素时钟信号(RS422电平)也转换成TTL电平接入A/D数据采集卡的触发端,触发采集卡进行信号的采集。PC机则通过串口控制单片机对扫描分辨率和幅度进行调节。
2.2 快速振镜模块
激光共聚焦扫描显微镜的光学扫描方式存在非线性畸变,当振镜作等角扫描时,其像素点的间距存在差异,为了消除非线性畸变,可选用CRS系列振镜。CRS系列扫描振镜带有像素同步脉冲,其作用是线性化整个扫描区域的采样点位移,因此能够很好的解决扫描区域的非线性问题。
(1) CRS振镜
本系统Y方向振镜选择CRS 8k振镜。CRS 8k振镜是一种高频共振扫描器件,其共振额定频率是7910Hz,最大扫描角度26°。
(2)振镜驱动板电路
CRS驱动板的设计特别考虑了扫描系统工作时相位特性和品质冈素Q存在的微小变化,驱动板包含了一个自身振荡回路,用以保持扫描系统存工作中可以达到机械共振。
(3)像素时钟板
像素时钟是用来线性化整个扫描场。CRS振镜存在一个正弦角位移,频率等于该扫描振镜工作时的共振频率,这个正弦角位移就相当于振镜工作时的一个噪声,必须加以去除。使用恒速像素,边沿象素就会扩散,中部会压缩。而像素时钟提供了速度更正,像素时钟以不断变化的速度,配合扫描仪的角速度变化来达到共振频率。最小扫描失真的实现与线性化像素时钟可以实现位像素等距扫捕场。而此时像素时钟,便用来纠正小型扫描共振频率变异和扭曲。
2.3 电平转换
在进行串行通信时,要求通信双方具有标准且统一的接口标准,这样才能方便的使不同的设备进行通讯。在本系统中,快速振镜驱动板输出的像素使能信号为RS232电平信号,而像素时钟信号则是RS422电平,这两种电平信号均需送入单片机中,而单片机却只能接收TTL电平信号,为了能实现通信,所以必需通过电平转换模块来使信号匹配。本系统中用OP37芯片进行像素使能信号RS232电平到TTL电平的转换,使用专用芯片SN75175进行像素时钟信号RS422到TTL电平的转换。
2.4 D/A转换部分
根据扫捕系统对D/A转换速度、精度、分辨率等指标的要求,本系统选用12位的D/A转换芯片AD7541。AD7541是一款兼容TTL/CMOS电平的D/A转换芯片,且功率小、噪音小、转换精度高,内部采用梯形电阻网络结构 建立时间小于1us。考虑到需用电压控制慢速振镜的电机,则必须将AD7541输出的电流信号转换成电压信号,且要求电压信号为正值,本系统采用单极性电压输出方式、D/A转换电路如图3所示。
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)