糊矢量控制的多电机同步控制系统的设计方案
1 引言
随着近年来传动系统的发展,多电机传动系统已经被广泛地应用于各种领域。为了提高多电机传动系统的动态性能和稳态性能,满足一些特定系统对多电机控制的同步要求,多电机协调同步控制方法的研究变得越来越重要。针对交流电机的数学模型是一个高阶、非线性、强耦合的多变量系统,以及矢量控制的不完全解耦性等缺点,本文引入了智能控制中的模糊控制技术,选用参数自调整模糊控制器,设计了一种基于模糊矢量控制的多电机同步控制方案从而提高系统的动态性能。方案中使用西门子变频器的矢量控制功能对交流电机进行变频调速,在西门子PLC中实现了参数自调整的模糊控制。并通过Matlab进行系统设计的仿真验证和分析。
2 多电机同步控制系统概述
在现代应用系统的设计开发过程中,充分利用计算机仿真、实验技术,对于系统设计开发过程中合理选择系统结构、优化系统参数、检验控制方法,提高系统设计与开发效率有着极其重要的作用。本文依据已提出的矢量变频调速与合成误差补偿主从串联控制方案构建了主从轴协调控制实验系统,为实际应用系统的设计积累经验与资料,硬件结构图如图1所示。由于可编程控制器(PLC)具有硬件简单、编程方便、抗干扰性强等有点,现已广泛的应用与交流电机控制系统中,本章介绍的矢量控制是以PLC作为控制核心的控制系统。
多电机同步控制系统的正常运行对电气传动控制系统的要求基本有以下几点:
(1) 传动系统要有一定的稳定精度和快速动态响应。其中稳态精度±0.01~0.02%,动态精度±0.05~0.5%,同步动态精度为±0.05~0.45%;
(2) 工作速度要有较宽、均匀的调节范围。调节范围为 之间;
之间;
(3) 具有负荷动态调整的功能,以免造成负荷动态转移而引起的过流或过压;
(4) 具有良好的接口能力。
3工业控制系统的硬件设计
3.1 变频PLC控制系统
在工业自动化控制系统中,最常见的是变频器和PLC的组合应用,并且产生了多种多样的PLC控制变频器的方法,构成了不同类型的变频PLC控制系统。
变频PLC控制系统在变频器控制中属于通用的一种控制系统。一个变频PLC控制系统通常由三部分组成,即变频器本体、可编程控制器PLC部分、变频器与PLC的接口部分。交流电机由西门子变频器进行一对一的传动控制。西门子S7-200PLC负责控制系统的开关量、负责数据的处理和工艺控制。交流变频器通过RS-485实现与PLC之间的通信。
PLC变频控制系统实验室设备结构框图如下图所示:
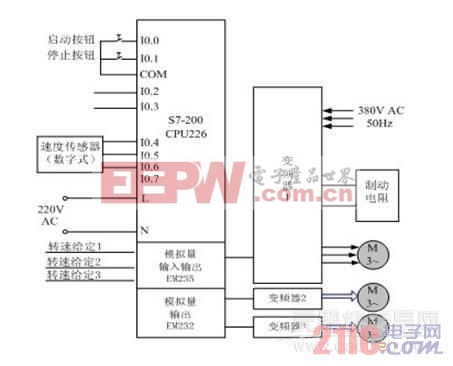
图1 系统实验结构框图
本文重点研究交流电机的同步控制,为达到研究目的,在上述工业控制网络中,以一台交流电机为主动电机,以其它交流电机为从动电机,按照交叉耦合并行同步控制方式,进行交流电机的同步控制。
系统中,由S7-200系列PLC完成数据的采集、处理和对变频器、电动机等设备的控制任务。主、从电机接受PLC或其他系统的速度指令,通过编码器形成速度反馈,使系统达到精确的速度控制。当主电机获得PLC的启动命令和速度给定时,经过矢量变频器进行处理,调整转矩获得给定的速度。如果从电机并未将力矩传递到负载上,那么从电机将感觉到负载重增加扭矩,同时主电机也将相应的减小扭矩;若主电机负载稍轻,那么主电机就会相应的减小扭矩以保证与从电机保持相应的速度,主从任何一方的负载变化必将反映在另一方的输出转矩变化上。
3.2 变频器装置
西门子6SE70系列变频器是一种电压型矢量变频器。它能利用处理器完成复杂运算、开环和闭环的控制、通讯等任务,保证生产过程控制精度和静态、动态的控制最优化。其动态响应不低于0.25%,静态精度不低于0.01%,能够满足控制系统的要求。本系统是要对交流电机实现高性能的速度控制,以实现交流电机同步速度的跟随,西门子6SE70矢量控制的标准软件包含两种基本的控制型式:频率控制适用于简单应用场合和成组传动高水平同步运转。磁场定向闭环控制(矢量控制)用于动态性能要求较高的传动系统。根据本系统的要求,我们选择闭环速度控制,这样能在较低转速时有较高的动态特性和高转速精度。其原理图如图2所示:
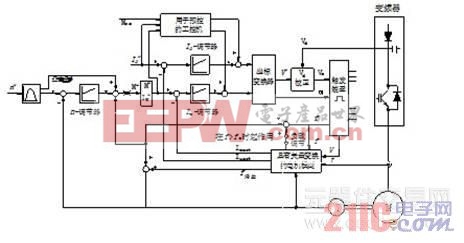
图2 带速度检测的闭环速度控制原理图
在6SE70变频器中,速度调节器为一个传统的比例积分(PI)调节器,无自适应能力。主要表现在两方面:
(1) PI控制器参数整定必须相对于某一系统参数己知的系统。
(2) PI控制器参数一旦整定完毕,便只能适用于已知的系统。
该实验系统中,主从电机为两台不同交流异步机,分别由两台变频调速控制器供电。主轴变频器控制信号由工控机按实验要求与合成误差控制器的叠加给定;从轴变频器控制信号是由工控机经协调控制策略,跟踪偏差实时计算
- 基于模糊矢量控制的多电机同步控制系统的设计(03-12)
- PLC实现变频调速器多电机控制(12-14)
- 基于CAN总线和PCC的多电机消隙天线控制系统(10-24)
- CAN总线在多电机软起动系统中的应用(07-04)