基于Flexray总线的车载指挥控制任务计算机的设计与实现
时间:08-04
来源:互联网
点击:
3 指挥控制计算机的软件设计
指挥控制计算机的软件主要驻留在处理器模块上,分为系统软件、实时任务软件、地面支持软件三部分。软件功能结构如图2所示。

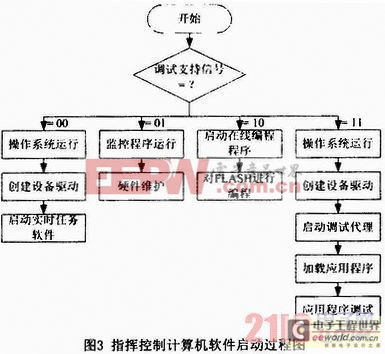
指挥控制计算机工作模式分为4种:实时模式、 监控模式、在线编程模式、调试模式。实时模式下指挥控制计算机在操作系统调度下运行实时任务软件;监控模式下指挥控制计算机运行监控软件,可启动测试软件对硬件资源逐一进行测试;在线编程模式下指挥控制计算机可对其FLASH存储器中固化的程序进行更新;调试模式下指挥控制计算机可与宿主机通过以太网进行联机,在调试代理的支持下进行应用软件的开发调试。指挥控制计算机工作模式选择流程及启动过程见图3所示。
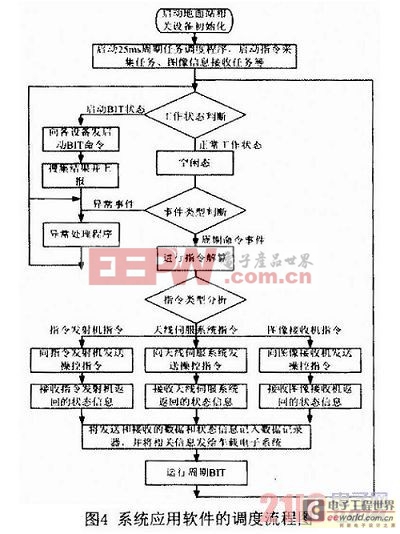
实时任务执行软件包括通讯管理软件、数据通讯管理软件、天线伺服系统模拟输入/输出管理、图像数据处理软件和FLASH电子盘记录管理软件等功能。软件的调度流程见图4所示。
4 结束语
FlexRay是新型的高速总线通信标准,在车载系统中采用FlexRay作为通讯总线的解决方案,既提升了通讯带宽和传输效率,又有易于系统扩展和功能升级,满足车载应用环境下实时性和可靠性的要求。研究表明,基于FlexRay总线能很好地实现数据的传输和交换,实现在高速的情况下进行实时通信的功能,通讯效果良好。
本文详细地介绍了基于FlexRay总线的车载指挥控制任务计算机的总体设计思想,阐述了系统硬件平台中的功能单元的设计,重点介绍了FlexRay总线的设计难点。同时详细介绍了基于VxWorks实时操作系统的软件架构设计,从而解决了车载应用环境对多任务和高实时性的需求问题。
- 基于Flexray总线的车载指挥控制设计与实现(11-17)
- ]基于Flexray总线的车载指挥控制任务计算机的设计与实现(08-28)
- FlexRay总线网络管理策略(10-12)
- 基于MFR4200的FlexRay总线接口技术(08-30)