基于NiosII软核处理器的步进电机接口设计
时间:08-04
来源:互联网
点击:
3 电机控制模块的仿真与验证 4 结论
1)功能仿真
电机控制模块在Quartus II上的综合结果如图3所示,电机控制模块是由slave、step_control、step_wave及step_cp 4部分组成。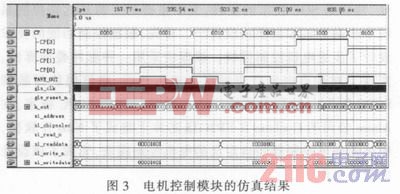
2)SOPC平台验证
首先导入的HDL文件是用于描述模块的硬件逻辑功能。对于电机控制模块,导入的文件分别是motor.v、step_control.v、step_wav e.v和step_cp.V,其中motor.V是顶层文件,配置SOPC平台,如图4所示。 
当通过SW开关设定不同的值时,相应控制电机的4路脉冲信号就可以通过led显示出来。同时,利用Quartus II中的signaltap II的对电机控制模块仿真如图5所示。仿真结果是与实际设计相符的。
根据控制功能的要求,文中设计了步进电机控制模块,该模块采用一种脉冲叠加算法,实现了对步进电机正、反转控制;实现了对步进电机转动的定位和任意频率变速。完成了对该模块向SOPC Builder的标准模块库中的封装。
结合Avalon总线、Nios II内核及其外设的特点,使用Quartus II和SOPC Builder存Cvclone II上创建了一个远程控制的硬件平台。
- 单片DSP处理器功能系统的SOPC技术设计(01-12)
- 基于DSP和SOPC数字信号发生器的设计(01-05)
- 基于Linux的SoPC应用系统设计(04-23)
- 基于DSP的实时数据处理系统浅析(02-28)
- 基于LXI总线的1553B通讯模块设计与开发(11-24)
- 双MicroBlaze软核处理器的SOPC系统设计(01-27)