基于F2808的永磁同步电机伺服系统设计
1 引言
与其他电机相比,PMSM构成的交流伺服系统具有明显的优势,如效率高、低速性能好、转子惯量小等,因此研究PMSM构成的高性能驱动和伺服控制系统,具有重要的理论意义和实用价值。针对PMSM控制的工程实际,设计了一种基于DSP F2808的数字伺服控制系统,采用直流母线电压纹波补偿、遇限削弱积分PI控制算法、防振荡处理等控制策略,实现PMSM高性能伺服控制,给出了伺服控制系统相关原理、软硬件设计和实验结果。基于上述方法开发的控制装置具有良好的性能,已获得实际应用。
2 交流伺服控制系统的相关控制方法
2.1 PMSM转子磁场定向矢量控制
在d,q旋转坐标系下,转子磁场定向矢量控制的PMSM电压、磁链方程为:

式中:Rs为定子绕组电阻;ω为磁场旋转速度;ψsd,ψsq,Ld,Lq,id,iq分别为d,q轴方向上的磁链、电感和电流分量;ψM为永磁体磁链。
当控制isd=0时,电机电磁转矩方程为:
Te=3npψMisq/2 (2)
Te与isq成正比,控制isq可使PMSM获得快速的转矩响应。
2.2 直流母线电压纹波补偿
实际系统中,输入电压的波动和电机负载的扰动会引起变频器直流母线电压波动。为减少母线电压纹波扰动对PWM输出电压的影响,需对直流母线电压进行合适的纹波补偿,具体方法是在定子参考电压Usα,β方向分量各乘一个加权系数,计算方法如下:
式中:index为调制系数,满足0index1,其具体值取决于输出电压的调制方式;x为Us在α,β方向的向量输入,x=α,β;α*,β*为α,β方向的向量输出。
在这里采用的SVPWM中,index=0.866,0udcbus1对应直流母线电压的0~100%。y=sign(x)为符号函数,定义如下:

2.3 遇限削弱积分PI控制算法
传统数字PI调节器的增量式模型可写为:
△u(k)=u(k)-u(k-1)=Kp[e(k)-e(k-1)]+Kie(k) (5)
式中:k为采样次序;u(k)为k时刻PI调节器输出;e(k)为k时刻输入误差信号;Kp为比例增益;Ki为积分增益,Ki=KpT/TI,T为采样周期,Ti为积分时间常数。
为防止PI调节器积分溢出和输出饱和,系统采用了遇限削弱积分的退饱和PI控制算法。当PI调节器进入饱和区后,不再进行积分项的累加,而执行削弱积分运算,可快速退出饱和。其具体控制算法为:e(k)=r(k)-y(k),u(k)=x(k-1)+Kpe(k),x(k)=x(k-1)+Kie(k)+KcorEpi,其中Kcor为校正增益因子,Kcor=Ki/Kp,Epi=uo-u(k),当u(k)>Umax,uo=Umax;当u(k)Umin,uo=Umin,否则uo=u(k)。
2.4 防振荡处理
在伺服控制中,当转子转到给定位置时,电机转矩还需给负载一个保持转矩,该转矩使电机转子易发生振荡,使转子来回摆动无法快速定位。为达到快速、精确的定位功能,系统采用变PI系数的控制方法,其原理如图1所示。当位置误差足够大时(区域1和5),进行快速调节,位置和速度PI调节器参数保持不变;当位置误差足够小时(区域2和4),为防止超调,PI调节器参数逐渐变小;当转子进入防摆动区域时(区域3),PI调节器参数均设置为零,即保持位置不变。实验表明,该方法能够有效消除转子到达预定位置时停机的振荡现象。

基于矢量控制的PMSM伺服控制系统框图如图2所示。
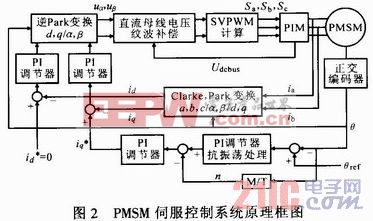
系统采用三环结构:位置环为外环,以获得准确的位置控制;速度环为中环,实现速度跟踪;基于id=0磁场定向控制的电流环设置为内环,以获得快速的转矩响应。主要控制策略包括:转子磁场定向矢量控制、空间矢量调制、直流母线电压纹波补偿、遇限削弱积分PI控制算法及防振荡处理等。
3 伺服控制系统软硬件结构及其设计
3.1 系统硬件设计
基于DSP F2808的伺服控制系统硬件结构如图3所示,主要包括F2808控制板、IGBT功率模块和驱动电路、电压电流检测电路、光电编码器位置检测电路、LCD显示电路、辅助电源及一台带增量式光电编码器的PMSM伺服实验电机。
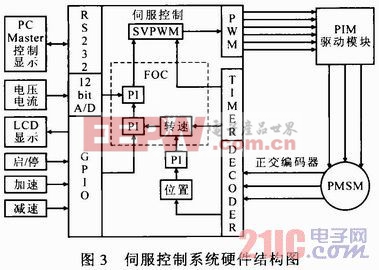
(1)F2808是一款高性价比的32位定点DSP控制器,运算速度高达100 MIPs,具有运算速度快,存储容量大,采样精度高,扩展能力强等特性,包含电机驱动的所有外设,无需扩展即可实现全部控制功能。在系统中,该DSP完成磁场定向矢量控制、空间矢量调制、直流母线电压纹波补偿、遇限削弱积分PI控制算法等的全部控制算法。
(2)系统采用电阻分压法采样检测直流母线电压,电机两相输入电流用电流霍尔LV28-NP检测,得到的电流采样信号经滤波处理、比例放大和电平提升后送入DSP的A/D采样模块。同时采样信号通过比较电路还用作软硬件保护信号,如欠压、过压、过流保护等。
(3)电机增量式光电编码器输出的正交脉冲信号经抗干扰处理后,送至DSP正交编码器QEP接口。DSP通过对输入脉冲的计数,计算出电机转子转速和相对转子位置。编码器的index信号用于初始定位和转子位置偏差的校正。
(4)系统采用LCD显示电机各运行状态参数。同时通过RS232与PC连接,开发人机界面,对电机进行实时控制和状态监控。
3.2 伺服系统软件设计
系统在进行伺服控制时,由图2可知,首先通过比较给定位置与编码器实测位置得到位置误差,该误差经抗扰动处理后,由位置PI调节器得到一个速度给定。速度给定与实测转速进行比较,经速度PI调节器得到转矩电流参考。参考电流与实际电流进行比较,误差经电流PI调节器得到电压输出向量。经直流母线电压纹波补偿后,通过SVPWM计算产生PWM控制信号,用以控制逆变器驱动伺服电机。
- 基于STM32单片机的大扭矩永磁同步电机驱动系统(01-25)
- 基于FPGA的永磁同步电机控制器的设计(06-05)
- 同步电机与异步电机的区别(12-14)
- 浅谈同步电机高压变频调速装置在包钢中的应用(12-14)
- 针对望远镜机架的电机驱动方案(12-13)
- 三相永磁同步电机无传感器矢量控制方案(12-13)