基于单片机和Modbus协议的停车器控制系统
时间:08-18
来源:互联网
点击:
现场主控制模块单片机输出的TTL逻辑电平通过光电隔离后,经过三极管放大的输出,经过接24 V电源的上拉电阻和显示用的发光二极管,输出电压以控制继电器,选择正反两个连线方案,进而实现对转辙机电动机的控制,实现前进、后退和停止,如图6所示。 

(1)主机程序
主机程序流程图如图7所示。系统的初始化包括打开串口和设置串口。程序先检测是否有按键按下,如果有按键按下,则根据按键封装相应的数据并发送,否则继续检测是否有按键按下。然后检测串口是否收到来自从机的数据,如果有收到数据,则解析该数据并做相关处理,显示出来,然后继续检测是否有按键按下,否则继续检测串口是否有收到数据。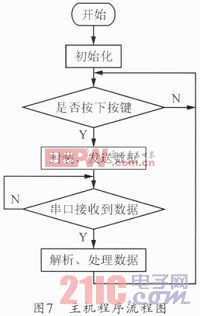
(2)从机程序
从机程序流程图如图8所示。系统的初始化包括打开串口和设置串口。程序先检测串口是否收到来自主机的控制数据,此时也包括检查数据是否发送给本机,如果有收到数据则解析该数据,并对电机做出相应的控制;否则继续检测串口是否有数据。然后封装并发送现场采集的信息,之后继续检测串口是否有数据。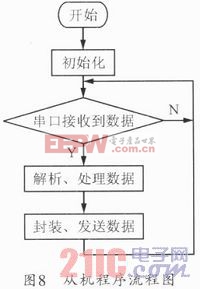
此系统整体成本相对较低安全性、可靠性和实用性较高,实现集中化监视和实时控制现场系统,节约成本,而且根据需要,可以在预留的端口上接入相关设备并增加相应程序便可并入主系统,比如增加视频采集设备和相关程序,便可以更方便地查看停车器现场的实时情况。
停车 控制系统 协议 Modbus 单片机 基于 相关文章:
- MSP430F 在高速公路不停车收费系统(ETC)中的应用(06-05)
- 智能停车场系统故障维护常识(12-21)
- 基于3G/4G停车诱导信息发布系统应用方案(12-20)
- Valeo采用LMS SYSNOISE进行超声波停车辅助设备开发(12-19)
- 智能停车场USB转串口的应用介绍(12-14)
- 停车指引系统嵌入式无线网关设计(09-12)