流量传感器测量车辆瞬时耗油量的程序实验
汽车的油耗跟哪些因素有关?下面列举一下:
1、路况。
2、驾驶方式。
3、风阻。
4、速度。
5、档位。
6、空调。
7、开窗户。
等等、等等......
是不是太多因素了?
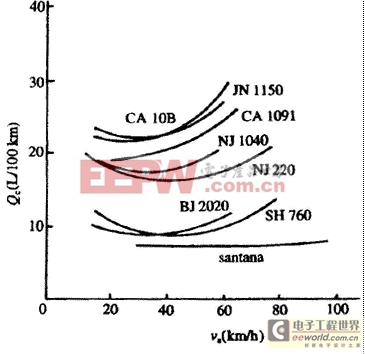
一般说来,车辆的油耗最大影响因素是速度。速度太高势必费油,太低也是费油的。看懂下列的表:

有个名词叫巡航速度。什么是巡航速度呢?
定速巡航系统 CRUISE CONTROL SYSTEM 缩写为CCS,又称为定速巡航行驶装置,速度控制系统,自动驾驶系统等.其作用是: 按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶.采用了这种装置,当在高速公路上长时间行车后,司机就不用再去控制油门踏板,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。
这种系统在国外汽车上应用较多,在美国,安装率已达到60%以上。然而,在我国由于道路条件限制,没有什么大用。专业人士表示:原则上定速巡航要在高速公路或全封闭路上使用。因为在非封闭路上,复杂的路况不利于交通安全。例如在国道上,一些拖拉机动力不足,会给巡航车辆造成障碍;另外很多小路口又往往有车辆冲上路面,在定速巡航的情况下,容易措手不及,而且在国道上反复刹车也无法保持稳定的定速巡航状态,失去了定速的意义。另外,盘山路或弯路过多时一定要慎用定速巡航。因为在正常出弯路的情况下,要适当加油提供更大的转向力,而定速巡航状态下车辆自动维持车速恒定,油门由行车电脑控制,往往给弯路行车带来危险,在这种条件下,应当适当控制车速。
呜呜!想省油却忽略了安全。不值得。
我有个办法让你既省油又安全,请看我做的小产品“油宝”。
我的办法是:直接在供油油路上串联一个汽油流量计。用它来观察油料的瞬时消耗,自己的车自己开,省油的机会自己找。
设定5秒钟刷新显示一下油料消耗(以毫升作为计量单位),当你开车上路后,你观察油量的消耗,当你慢慢吞吞的走时,油耗计数较大,但当你行车正常时,油耗会下降并且会有较稳定的显示,你只需要根据表的显示,找到又比较快速又比较省油的行车速度就可以啦,不过当你有急事或者飙车时,油量会急剧上升的。
例如:当车速为60公里时,设油耗稳定在一个值比如20,可当你把车速提高到80公里,此时显示油耗40,你会觉得得不丧失,又没要什么急事,开那么快干什么,于是你又回到60的车速,油宝也显示为20了。讨厌!前面有个人横穿马路,你一脚刹车就慢到10公里,此时显示的是30,所以当你走过他后,你立刻又会跑到60公里,因为这个速度既省油又快。
恭喜你!你已经找到爱车此刻的最佳省油状态了!你会用我的“油宝”来为你创造价值了!
实验的情况见下图:

电路图如下:

完整版本的代码下载:http://www.51hei.com/f/youbao1.rar
试验程序如下:
;实验:流量传感器(霍尔器件)脉冲显示程序;该程序实现流量传感器的脉冲数计数;同时二进制显示在P1口的发光二极管和十进制显示在三位数码管上。;接线图: +5V----------------------传感器红线(+5V电源); +5V---10K电阻----传感器黄线(脉冲输出)---单片机INT0(P3.2); GND----------------------传感器黑线(地); 30H--3秒内脉冲数 31H放个位数 32H放十位数 33H放百位数;严老师 2011.3.2调试毕。 org 0000h ;源程序开始地址 jmp main ORG 03H ;设置中断服务程序入口地址 INC 30H RETI org 50h ;主程序开始main: setb it0 ;下降沿触发方式 mov ie,#10000001b ;开放中断,允许外部0中断 mov 30H,#0 ;脉冲计数器清零here: mov A,30Hcpl a mov p1,a ;显示。因为是0亮1不亮,所以要cpl反相;数码管显示子程序 从30H中取数,转换为压缩BCD码,并通过串口发送到数码管显示。xshi: mov a,30h mov b,#100 div ab mov 33h,a mov a,b mov b,#10 div ab mov 32H,a mov 31H,b MOV 30H,#0 MOV DPTR,#xshm MOV SCON,#10H loop_1: MOV A,31H MOVC A,@A+DPTR MOV SBUF,A JNB TI,$ CLR TI MOV A,32H MOVC A,@A+DPTR MOV SBUF,A JNB TI,$ CLR TI mov A,33H MOVC A,@A+DPTR MOV SBUF,A JNB TI,$ CLR TI CALL DELAY CALL DELAY CALL DELAY CALL DELAY CALL DELAY ;inc 30h jmp here delay: mov r7,#10 ;延时子程序(精确定时1秒)d1: mov r6,#200d2: mov r5,#229 djnz r5,$ djnz r6,d2 djnz r7,d1 ret xshm: DB 3FH,06H,5BH,4FH,66H ;0,1,2,3,4DB 6DH,7DH,07H,7FH,6FH ;5,6,7,8,9end
- 基于MSP430F2132的温差式原油流量传感器设计(09-08)
- 基于82527的CAN总线智能流量传感器节点设计(12-13)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)