基于AT89C2051的超声波测距系统
摘要:介绍了利用超声波传感器实现的非接触式距离检测系统。该系统可以用于汽车倒车时的报警、液位和物位的非接触式测量,介绍了超声波传感器原理及系统各单元的设计。系统中采用了AT89C2051型单片机作为主控制器。把一种直流电机PWM调速芯片应用到此系统中,使得控制方法简便,应用范围增强,同时可以利用单片机设定距离值和输出控制信号。最终距离用串行方法在数码管上显示出来,可以直观地查看距离值,以实现测距、显示、输出控制信号的功能。
非接触式的距离测量在工业中有广泛的应用机器人视觉系统中对距离的测量,汽车倒车雷达系统及液位、物位的检测系统等。有鉴于此,设计了基于超声波传感器的测距控制系统,以实现距离的测量和显示,并能输出控制信号及实现和上位机的通信。与以往类似系统不同的是:本设计采用了一种直流电机PWM调速芯片作为超声波发射驱动电路。
其优点是:电路简单,易于控制,而且对于不同电压峰值要求的超声波传感器,可以改变其供电电压值。
显示部分采用一种串行通讯芯片驱动数码管,以节约单片机IO口的使用数量和提高数码量,因此,系统应用灵活,实用性强,其模块化设计可嵌入到不同的系统中。
1 超声波测距传感器
超声波传感器是一种换能器,它把电能或机械能转换成声能。本设计采用压电式超声波换能器,它是利用压电晶体的谐振来工作的。该传感器有2个压电晶片和1个共振板,当其两极外加脉冲信号,且频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动产生超声波。如果两极问不加电压,当共振板接收到超声波时,声波将迫使压电晶片振动,使机械能转换为电信号,这时它就成为超声波接收器。
每个传感器的中心频率都存在一定的误差,在40 kHz左右波动。而且超声波传感器发射波束时存在发散角问题,一般发散角都比较大,从而导致了方向性较差。同时,随着传播距离的增大,在不同的发散角上信号衰减的程度也有变化。它在空气中的发散角及耗散性如图1所示。
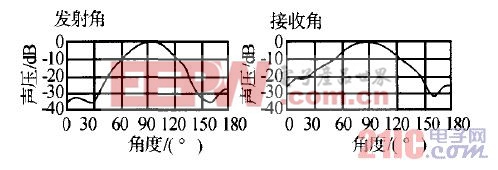
图1 发散角与耗散性
采用反射式超声波测距的原理是:当单片机控制超声波传感器向某一方向发射波束的同时,单片机内部开始计时。在传播过程中,超声波遇障碍物后反射回波。传感器接收到第一个反射波后,停止计时。由于超声波在空气中的传播速度是340 m/s,根据计时时间及公式S=340 t/2,即可得到发射点距障碍物的距离S.
2 系统总体方案设计
超声波测距系统包括4个部分,即①发射电路中振荡器驱动控制电路;②接收电路中模拟放大、滤波、信号调制电路;③数码管显示电路;④单片机系统及其串口输出、控制信号输出、按键输入部分。其方框图如图2所示。
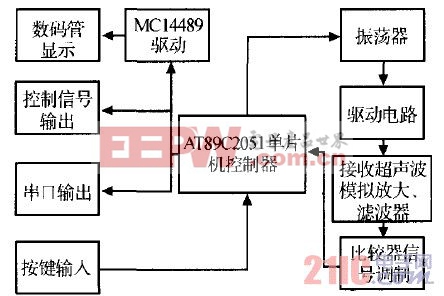
图2 系统原理框图
3 硬件电路设计
3.1 超声波发射单元
超声波发射单元包括振荡电路和驱动电路。振荡电路是由反相器CD4069组成的非对称式多谐振荡器,它产生40 kHz的方波脉冲电路如图3所示。
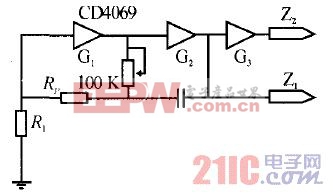
图3 振荡电路
电路中G2输出的电压由于 ,的调节,可以改变输入到G1输入端的相位。当相位达到同相时,G1和G2实现正反馈,G1和G2就成了稳定的振荡器。振荡周期公式为T=2.2×Rf×C.因为CD4069为CMOS结构,所以逻辑门前的电阻RP为G1的保护电阻。当RP足够大时,G1的输入电流可忽略不计。
由于超声波换能器中心频率都有偏差,所以Pf采用电位计,可以调节到最佳谐振点,这也是不用单片机产生方波的原因。电路中Z1,Z2同时得到相位相反的2路控制脉冲,提供给驱动电路。
驱动控制电路如图4所示。它采用了L293型直流电机PWM调速芯片,它内部的H桥电路可以产生相位相反的两路脉冲。驱动电路的直流电源电压可以改变,以适应不同传感器对电压的要求。振荡电路中产生方波的Z1、Z2端,分别接到驱动电路1N1,IN2端。控制输出电路中EN端为输出使能端,它接到单片机的P1.7端口,该端口精确输出高电平时问来控制发射方波的个数。这在设计上使得控制和方波产生相对独立,从而使得电路简单、控制精确、易于调试。
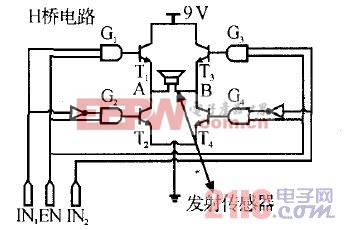
图4 驱动电路。
3.2 超声波接收单元
超声波接收单元中包括:模拟放大、滤波电路、电平转换电路,如图5所示。模拟放大器选用高精度仪用放大器LM318作为信号放大与滤波之用,它的单位增益带宽为15 MHz,超出音频范围能够满足40 kHz的要求。在放大电路的负反馈回路中接入电容C1构成低通滤波器。电容的选择可由公式。f=1/2πRfC求出,式中f0为采用的超声波频率,Rf为第一级的反馈电阻。因为多谐振荡器中有高频分量噪声,所以通过低通滤波器将高频噪声滤掉。经过2极放大后,通过电容耦合,信号与参考电压比较产生高低电平,提供给单片机产
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)