基于51单片机的无线遥控小车设计

这是遥控器,当然焊工不错(关键是看背面,阿康的技术绝对OK)
这个是遥控器的,上一幅图的绿色的PCB板子就是原理图上的2262,这个模块是老师发的包括有接收的2272,因为地址码已经做好了,所以只要发数据码就可以了,联系到接收,因为接收有悬空、0、1的三种状况,为了避免误发信息所以将悬空的功能隐去,只在按键按下的时候发送高信号。

车,底座、轮胎、齿轮是买的其他均为手工制作

以上是小车的,截图截了两次
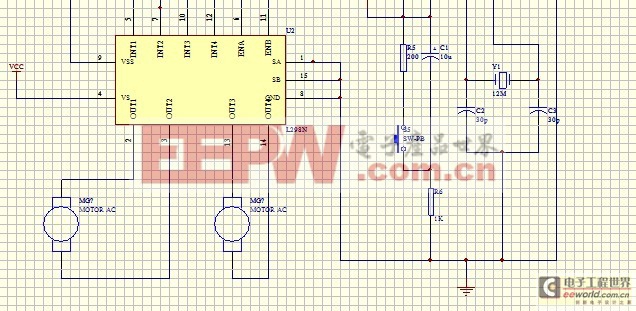
这一部分是小车的驱动和控制模块,是最主要的模块。分别是2272的接收模块,单片机,L298的驱动芯片。2272是M型的也就是非锁存模式的,检测到信号的时候会在相应的地址位输出高,当没有检测到的时候是为低,虽然2272是CMOS工艺2.5到15V均可以工作,但是兼容TTL电平,所以,单片机完全可以读取电平信号。L298电机驱动芯片的功能强大,因为本身自带逻辑电压输入端,所以只要电压控制在7V以下,单片机即可直接驱动这块芯片。电机启动时候的电压电流会高一点,但是L298可以输出电流达2A这个是比较大的了,驱动小电机完全不在话下。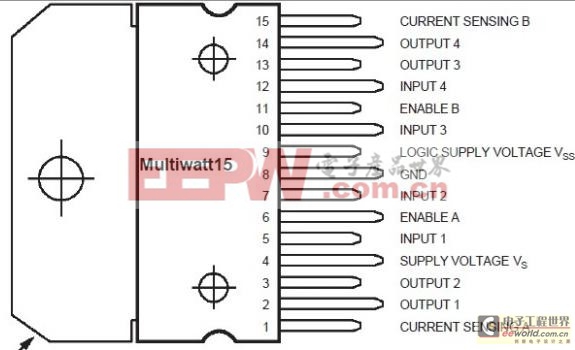
以上是L298的以及引脚图
下面贴一下程序吧,呵呵。
//////////////////////////////////////////////////////////***C51程序*******////////////////////////////////////////
#include reg51.h>#define TH0C 0xff#define TL0C 0xf6unsigned int dr_l,dr_r,times; //duty ratio 是占空比的意思。unsigned char flag;sbit leftv=P1^0;sbit leftg=P1^1;sbit rightv =P1^2;sbit rightg =P1^3;sbit ena=P1^4;sbit enb=P1^5;sbit key0=P2^5;sbit key_a=P2^0;sbit key_r=P2^1;sbit key_l=P2^2;sbit key_b=P2^3;void beforeint(void);void main(){while(1){ P2=0xff;if(key0){ena=1;enb=1;if(key_a){flag=1;dr_l=50;dr_r=50;leftv=1;rightv=1;beforeint();}if(key_r){flag=2;dr_l=99;dr_r=1;leftv=1;rightg=1;beforeint();}if(key_l){flag=3;dr_l=1;dr_r=99;leftg=1;rightv=1;beforeint();}if(key_b){flag=4;dr_l=50;dr_r=50;leftg=1;rightg=1;beforeint();}}else{ena=0;enb=0;flag=0;P1=0xff;continue;} }}void beforeint(void){TMOD=0x01;TH0=TH0C;TL0=TL0C;TR0=1;ET0=1;EA=1;}void time0(void) interrupt 1 using 2{times=0;TH0=TH0C;TL0=TL0C;times+=1;if(times>99){times=0;}if(flag==1){if(times=dr_l){leftg=0;}else{leftg=1;}if(times=dr_r){rightg=0;}else{rightg=1;}}else if(flag==2){if(times=dr_l){leftg=0;}else{leftg=1;}if(times=dr_r){rightv=0;}else{rightv=1;} }else if(flag==3){if(times=dr_l){leftv=0;}else{leftv=1;}if(times=dr_r){rightg=0;}else{rightg=1;}}else if(flag==4){if(times=dr_l){leftv=0;} else{leftv=1;}if(times=dr_r){rightv=0;}else{rightv=1;}}}////////////////////////////////////////////////////******************************///////////////////////////////////
完整的程序代码从这里下:http://www.51hei.com/ziliao/file/xiaoch.rar
小车的演示视频:http://v.youku.com/v_show/id_XMTM3MDkyMDA4.html
程序是根据2272接收到的型号判断该左转右转还是前进后退,这个是四个基本功能,我们的小车也就实现这些功能,对于电源我们处理的不是很好,只是简单的将小车共地。并且把L298的逻辑电压单独接出来,这个小车以后还是会改进的,呵呵。
后记:该说的都说的差不多了,程序很简单,我只用了几个钟头包括仿真(Proteus仿真图就不贴出来了),主要是控制,然后就是产生PWM来进行对小车的调速,不过调试的时候 一次通过,虽然转的比较快,但是不影响转弯。有问题请随意,呵呵。
- 关于RTX51 TINY的分析与探讨(05-30)
- 浅析8051模块化编程技巧(05-28)
- 基于DSP和单片机通信的液晶显示设计方案(07-20)
- 锁相环控制及初始化简析(08-27)
- 基于MSP430自动胀管控制器的研究(09-07)
- 嵌入式C实现延时程序的不同变量的区别(03-01)