基于CAN总线的机电式自动调平控制系统
时间:09-19
来源:互联网
点击:
英硕自动调平系统目前主要国内外大中型雷达天线座车、通讯车以及工程机械的机电、液压式支腿调平控制中。
>> 调平时间:含支腿自动架设在内时小于1.5分钟;半自动立即调平时小于0.5分钟
>> 支腿承重:2~8吨
>> 调平精度:1~3’
>> 调平模式:“一键式”全自动调平、半自动立即调平
>> 系统操作温度:-40℃~70℃
该系统具有如下显著特点:
a) 采用“升降平衡”的闭环式调平策略,单腿结构受力状况良好,调整过程平稳光滑;
b) 调平过程中保证座车中心高不变;
c) 调平速度快,精度高;
d) 可实现动态水平调整,自动跟踪消除偏差;
e) 科学合理的调平策略确保无“虚腿”产生;
f) 具有支腿最大行程、支腿着地状态的智能检测,并提供直观的HMI显示;
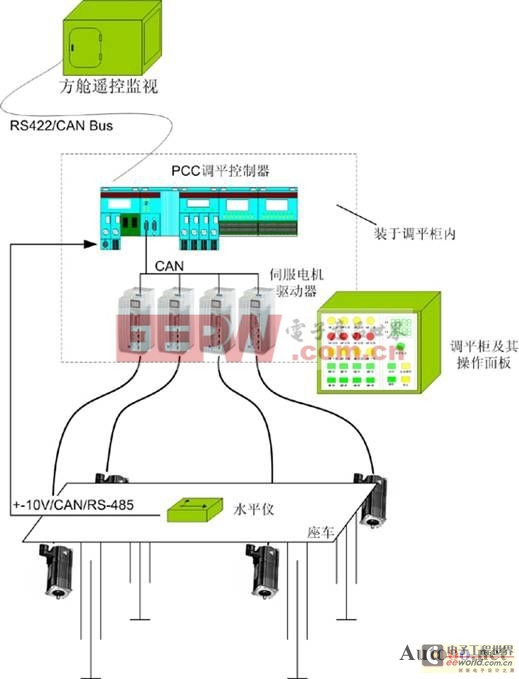
以机电式调平为例,英硕调平系统图示如下:
>> 调平时间:含支腿自动架设在内时小于1.5分钟;半自动立即调平时小于0.5分钟
>> 支腿承重:2~8吨
>> 调平精度:1~3’
>> 调平模式:“一键式”全自动调平、半自动立即调平
>> 系统操作温度:-40℃~70℃
该系统具有如下显著特点:
a) 采用“升降平衡”的闭环式调平策略,单腿结构受力状况良好,调整过程平稳光滑;
b) 调平过程中保证座车中心高不变;
c) 调平速度快,精度高;
d) 可实现动态水平调整,自动跟踪消除偏差;
e) 科学合理的调平策略确保无“虚腿”产生;
f) 具有支腿最大行程、支腿着地状态的智能检测,并提供直观的HMI显示;
以机电式调平为例,英硕调平系统图示如下:
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)