BWS伺服系统无感伺服注塑机节能改造方案
一、概述
我国已持续近两年的电力供应短缺的现象,到2004年形势更加严峻,上半年出现拉闸限电的省市区已经达到24个。今年上半年,电力需求受9.7%GDP增长拉动,继续高速增长,并呈“工业用电继续保持快速增长,高耗电行业用电增长居高不下”的特征。而电力供应能力则增加有限,出现持续供应不足的局面,致使电力供需矛盾紧张,缺电范围和持续缺电地区进一步扩大。
对于塑料制品行业来说,电耗是其生产成本的主要部分,而注塑机是塑料制品厂的主要能耗设备之一,注塑机的能耗成为注塑行业降低成本,提高产品竞争力的有效途径。
目前绝大多数的注塑机都属于液压传动注塑机,液压传动系统中的动力由电机带动油泵提供。在注塑周期过程中的变化,注塑机在不同工序下需要的流量和压力不同,必须依靠流量阀和压力阀调节不同工序所须的流量和压力不同,以及负荷变化很大,由于定量泵不可调节输出功率,因此多余的能量只能在挡板,油路泄露,油的温升中消耗,加剧了各种阀的的磨损,又造成油温过高,电机噪音过大,以及机械寿命缩短等现象。并且通常在设计电机的容量比实际需要高出很多,存在“大马拉小车”的现象,造成电能的在量浪费。因此注塑机节能改造,对于减少能源费,提高竞争能力具有重要意义。
二、工作原理
塑料注射成型是利用三种状态(固态-液态-固态),借助于注塑机和模具成型出所需要的塑料制品。尽管所有的注塑机不尽相同,但注塑机的工作流程基本是相同。如图一所示,大致可分为七道工序:锁模、射胶、保压、溶塑、冷却、开模、顶针(顶针进、顶针退、射座退)等。每一动作的完成都有时间、压力、速度、位置等几个参数的精妙配合,也就是说在某一位置的位移都有相应的压力和速度,且在不同的位置和时间内其压力和速度都是可变的。同时每一动作完成后发出终止信号传送给程序控制器,程序控制器收到信号后才发出执行下一动作的指令。每一道工序都需要用不同的工作压力和流量,除了高压锁模、射胶及溶塑动作需要较大压力外,其它工序都工作在很小压力下,其压力和流量是靠压力比例阀和流量比例阀来调节,通过调节压力比例阀和流量比例阀的开启度来控制压力和流量大小。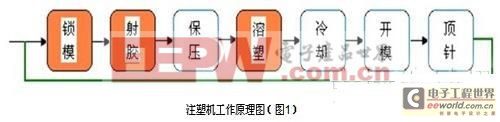
三、系统配置:
1.无感伺服控制框架流程图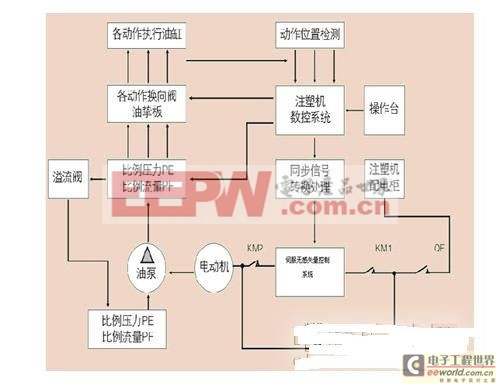
2.无感伺服改造原理图:
无感伺服节能改造施工简单,无需更换原注塑机系统的任何部件,其改造方式兼顾了变频节能改造的简单易行,详细如下图示: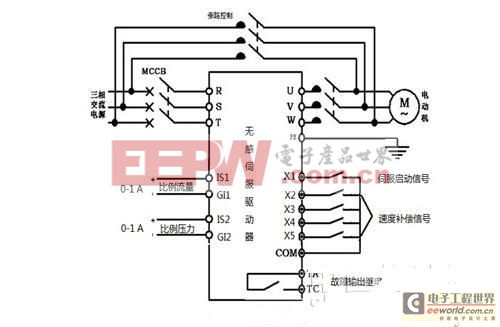
无感伺服改造原理图
由图可以看出,该系统保留了原来注塑机的电控系统不变,可以实现工频和节能状态两种运行方式自由切换,多方位的满足了客户的需求.
1.对于比例流量阀的处理: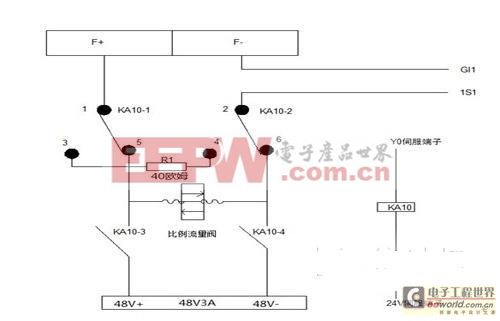
如上图所示,外接48V3A电源和一中间继电器对比例流量阀进行工频技能模式转换。工频时:KA10不动作,流量信号F+经KA10的常闭点1-5流经比例流量阀,再经KA10常闭点2-6,伺服驱动器信号端子流入注塑机控制器F-,形成完整完整回路,实现对比例阀开合度的控制。
节能状态:当处于技能状态运行时,伺服输出端子Y1动作,KA10吸合,外部48V3A电源经KA10的3,4常开端子和比例阀形成回路,该回路电流一直维持在1A,所以比例阀一直处于最大开合度状态;同时注塑机流量信号F+经过KA10吸合的常开点1-3,40欧姆电阻,常开点2-4,经伺服驱动器信号端子后流入注塑机控制器F-形成回路,当F+,F-两端电压在0-48v变化时,其回路电流刚好在0-1A变化,从而实现对伺服控制器的速度控制。
2.运行控制及速度补偿:
接线步骤:
1)先将驱动器24V和PLC端子上的短接片去掉。
2)将YCM接入伺服驱动器端子PLC.
3)判断注塑机YCM是注塑机控制电源24v的正端还是负端,如果是正端就将注塑机控制器24V电源负端经过节能状态时吸合接触器的常开触点后接入伺服驱动器X1.如果是负端就将注塑机控制器24V电源正端经过节能状态时吸合接触器的常开触点后接入伺服驱动器X1
4)将注塑机控制器对应的锁模,开模等输出信号分别接入伺服驱动器控制端子X2-X5.
运行控制信号:
当转换到节能状态时,该接触器吸合,24V电源经驱动器内部后,回到其公共端YCM形成回路,驱动器开始运行;当转换到工频状态时,接触器触点断开,切断了该工作回路,驱动器停止运行。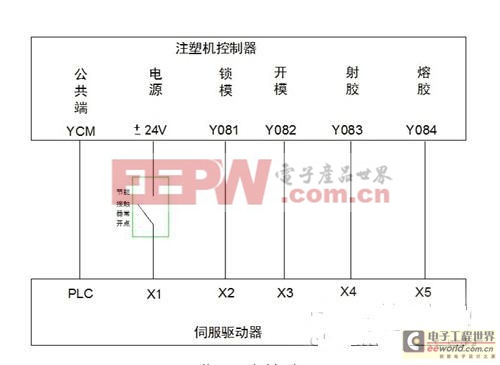
运行控制及速度补偿原理图
速度补偿:
当出现某一个工序工作压力和流量不是时,单独对该工序进行速度补偿,从而使电机在整个变化的负荷范围内能量消耗达到所需的最小范围,并确保电机平稳、精确地运行、即保证产品质量又节约电能,真正做到经济实用。
例如,当锁模时力度不够,而其它工序都正常工作时,可以通过该方式对锁模工序单独补偿。只需在伺服控制器内
- Profibus-DP总线技术及其在BWS伺服传动应用方案(01-07)
- BWS伺服技术在金属成形加工中的革新应用(03-18)
- DSP控制器应用的4个误解(04-23)
- 伺服驱动器在并联机器人上的应用(12-19)
- 基于MODBUS总线伺服电机运动控制方案(01-07)
- MC伺服驱动器数控系统方案(12-02)