基于LonWorks现场总线技术的智能节点设计
现场总线系统是自动控制系统发展的一种趋势。然而,当前还存在着大量基于各种非现场总线标准的设备,将这些设备全部更新成基于现场总线的设备几乎是不可能或不现实的。因此,开发现有设备到现场总线的接口转换设备,使现场总线技术与传统的设备有机地结合起来,将非现场总线设备集成到LonWorks现场总线系统中,实现基于现场总线的控制系统,是一项非常有意义的工作。
本文的目的是将现场总线技术、非现场总线技术、智能控制技术和单片机技术各自的优势有机地结合起来,设计一种既具有强大现场处理功能,又具有通信功能的智能控制节点。通过该智能控制节点,能够将传统仪器、设备挂接到LonWorks现场总线上,经LonWorks总线进行信息的传输与交换。
如GPIB接口是目前许多仪器的专用接口,通过GPIB总线控制仪器端,实现远程控制。然而GPIB系统却受到一些工作限制,如:①两个设备之间最大距离4m,整个电缆的长度不得超过20m;②GPIB母线上最多可挂15个设备,这主要是受TTL接口收发器驱动能力限制。当测试系统有必要使用多于15个器件时,需在控制器上再添置一个GPIB接口,即可多拉一条母线,多挂14个设备。
本文以具有GPIB总线接口的设备为例,通过设计基于LON总线的智能节点,将基于GPIB总线接口的设备转换成LonWorks现场总线设备,进而将空间位置上分散较远的基于GPIB总线的仪器仪表资源通过LonWorks网络有效联系起来,实现仪器的较远程控制和数据的分析、处理与资源共享。
智能节点的总体设计方案
LonWorks节点是同物理上与之相连的I/O设备交互作用并在网上使用LonTalk协议与其他节点相通信的对象。LonWorks现场控制节点包含:应用CPU、I/O处理单元、通信处理器、收发器和电源等。
LonWorks节点有两种类型:
①以Neuron芯片为核心的控制节点,Neuron芯片直接作为通信处理器和测控处理器,这类节点适合于I/O设备较简单,处理任务不复杂的系统。
②采用主处理器结构的控制节点,即Host Base节点,Neuron芯片只作为通信处理器,充当着LonWorks网的网络接口,节点应用程序由主处理器(一般用微控制器)执行,这类节点适合于对处理能力、输入/输出能力要求较高的系统,如图1所示。

图1 LonWorks智能控制节点
本智能节点采用Host Base节点结构。通信协议处理器采用Neuron 3150芯片,该固件中带有LonWorks网络通信协议,该通信协议集成了ISO全部7层协议。节点采用网络变量的形式发送和接收数据,通信速率可达78.125kbps,对于总线或环型拓扑网络结构,最大通信距离可达2700m;对于星型或自由拓扑网络结构,最大通信距离可达500m,满足了远程测控的需求。
本节点的最主要部分是主处理器,选用STC89C516RD+,它既要接收现场总线控制模块并行发出的信息并且将它转化成非现场总线设备能接收的信息格式,又要将非现场总线设备上的信息转化传送到现场总线控制模块。它是实现LonWorks现场总线系统和非现场总线设备间通信的桥梁。
智能控制节点的总体结构如图2所示,主要分为LonWorks控制模块与主控制模块及其外围设备接口。
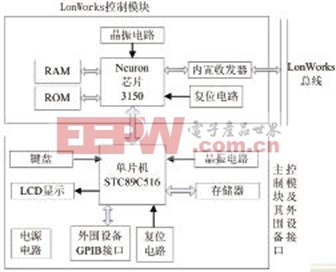
图2 智能控制节点总体结构框图
LonWorks控制模块电路设计
本节点将神经元芯片、FLASH ROM、RAM和收发器等集成为一个通用模块,称之为LonControl控制模块。以神经元芯片为核心的LonWorks控制模块主要负责对LON通信网络的管理以及与单片机的并行数据通信。
Neuron芯片3150选型
Neuron芯片是LonWorks技术的核心,每一个神经元芯片被赋予一个唯一的48位码的标识,称为标识码。它既进行通信的管理,也同时具有输入、输出和控制的能力。介质访问控制CPU处理LonTalk 7层协议的第1到第2层,包括驱动通信子系统硬件和执行MAC算法;网络CPU处理LonTalk协议的第3到第6层,包括处理网络变量寻址事务、权限证实、背景诊断、软件计时器、网络管理和路由等,同时还控制网络通信端口、物理的发送和接收数据包;应用CPU执行用户用Neuron C语言编写的代码以及用户代码调用的操作系统命令。芯片内有3个8位流水线作业的CPU,3个CPU分别通过片内的网络缓存器和应用缓存器进行通信。
神经元芯片选用日本东芝公司生产的TMPN3150B1AF,通常为64脚QFP封装。芯片内存储器的地址范围是E800H~FFFFH,包括2kByte的SRAM和512kByte的EEPROM。
神经元芯片外部存储器扩展电路设计
TMPN3150有16根地址线,可寻址64k空间,可以外接存储器,如RAM、ROM、EEPROM或FLASH。根据应用性能和成本要求,该智能节点的外部存储器采用FLASH和RAM。FLASH ROM不仅能够在断电的情况下保证数据不丢失,而且在上电情况下可进行理论上高达
智能 节点 设计 技术 总线 LonWorks 现场 基于 相关文章:
- 基于DSP的智能刹车控制系统研究(07-29)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)
- 五大主流智能手机操作系统的前世今生(03-02)
- 基于VxWorks的MB系列智能可编程控制器设计(01-16)
- 基于TMS320F2812的智能变送器(04-08)
- 利用低成本的MCU的UART驱动智能卡(05-04)