基于CAN总线的分布式电动型AMT系统
时间:10-24
来源:互联网
点击:
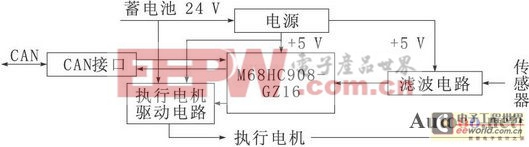
图3 AMT 控制节点结构原理
对电机的驱动采用场效应功率MOS 管,通过PWM 波对MOSFET 的开关控制,达到控制电动机电枢电压,实现调速目的。选用Infineon 公司生产的一款用于驱动大功率直流电机的智能型H 桥驱动芯片B TS7810 K,简化了设计过程,同时提高了可靠性。该芯片集成了4 个D2MOS 开关管,即可以组成为桥式电路也可以当作4 个独立的开关管使用;具有低的导通电阻RDS(ON) ,在25 ℃的结温度下,高侧2 个开关低至26 mΩ ,低侧2 个开关低至14 mΩ;每个开关管可以承受高达42 A 的峰值电流(在25 ℃的结温度下) ,并且具有非常低的静态漏电流(4μA) ;具有动力电源正负极短路保护功能;能够承受40 V 的直流电压;提供过热状态输出信号和过热保护功能;提供欠压检测功能;具有钳位二极管保护功能;高侧开关负载开路检测功能等。而且该芯片的工作温度范围为- 40~150 ℃,适合汽车运用环境。
由于采用了分布式控制系统,AMT 控制节点对电机速度和转角位置的控制精度直接影响到了AMT 的性能。为了对电机进行精确的控制,必须采用负反馈闭环控制系统。整个闭环控制系统是由被控对象(这里是直流电机驱动的机构负载) 和控制器2 部分组成的。控制器以误差/ 偏差作为控制器输入信号,按照某种控制规律对该信号作出运算,然后向被控对象发出控制信号,使得误差/ 偏差得到消除或者是减小,从而达到预期的控制目的。目前,在广泛使用的控制器中,常常采用比例、微分和积分等基本控制规律,或用这些基本控制规律的适当组合,比如PID 控制器,对被控对象进行有效控制。很多智能控制系统也往往是在这些控制规律的基础上发展起来的。
通过建立一个以PID 控制规律对直流减速电机进行转角位置控制的系统,建立其数学传递函数,进行仿真分析。然后运用单片机搭建数字控制系统,编写数字PID 控制程序,经过调试,整定PID 参数,以获得较好的输出动态性能和稳态精度。
采用M68HC908GZ16 芯片作为数字控制器,利用其内部的10 位A/ D 转换器,编写了直流减速电机的数字PID 控制程序。该数字PID 控制器的控制输出量为电机的电枢电压,反馈信号是蜗轮蜗杆直流减速电机输出轴的角位移的A/ D 采样值。
经过多次的调试、参数整定,得到了较好的PID控制效果。图4 是基于M68HC908GZ16 芯片的控制节点控制换档机构,针对实际阶跃输入的响应图,其中采样周期T = 10 ms。从图中可以看出,整个控制节点构成了一个完整的反馈控制系统,可以准确地将CAN 总线上输入作为给定量,快速准确地调整换档机构到达指定位置。
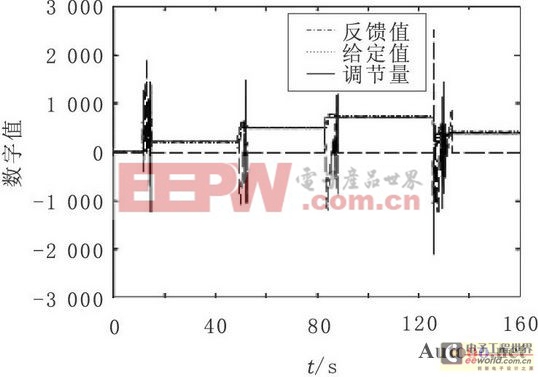
图4 AMT 控制节点阶跃响应控制效果
基于CAN 总线的分布式控制系统的开发工作,已被初步证明在技术上较集中控制是更加可行有效的,同时也是很经济的。AMT 控制采用基于CAN 总线的分布式控制系统的优点:
a. 有效减少了电机驱动电流在线路上的铜损,减少了故障发生的概率,提高系统的可靠性。
b. 利用CAN 总线实现信号传输全数字化,缩短了模拟信号传输距离,保证系统控制的准确性。
c. 该系统的控制单元全部分散到现场,控制回路由现场控制器实现,提高了控制的动态性能。
d. 现场总线中允许ECU 根据车况用数字通讯的方式对现场控制节点进行操作和调整,易于实现优化控制策略。
综上所述,基于CAN 总线的分布式全电动型结构非常适合于公交大客车AMT 系统。该系统利用CAN 作为汽车计算机网络总线,使AMT 各控制单元能够共享所有信息和资源,达到简化布线、提高系统可靠性和维护性、降低成本的目的。按照以上思路解决了全电动AMT 系统设计的技术难题,结合微电子技术,在总体传动结构不变的情况下通过加装微机控制的自动操纵系统来实现换挡的自动化。既保留了原齿轮变速器传动效率高、结构简单的长处,又以较小的代价具有了液力自动变速器的自动换档性能。
参考文献:
[1 ] 刘岩,丁玉兰. 电控机械式自动变速器控制系统的研究[J ] . 重型汽车,2001 , (1) :12 - 13.
[2 ] 卢永生. AMT 自动换档变速器在城市客车上的应用[J ] . 客车技术与研究,2006 ,28 (1) :41 - 43.
[3 ] 卢新田, 侯国政. AMT 控制系统结构及国外主要AMT 产品介绍[J ] . 汽车技术,2004 , (5) :19 - 22.
[4 ] 侯培国,韩向芹. 电控机械式自动变速器控制系统的研究[J ] . 传感技术学报,2005 ,18 (2) :296 - 299.
[5 ] 刘海鸥,陈慧岩,金亚英,等. 液压式离合器操纵机构在AMT 车辆中的控制研究[J ] . 液压与气动,2005 , (10) : 18 - 20.
[6 ] 任玉平,葛安林. 全电式AMT 选换挡系统模糊控制方法[J ] . 汽车技术,2004 , (8) :11 - 14.
[7 ] 黄向东,汪胜勇,赵克刚,等. 基于CAN 总线的HEV集散控制系统的通信[J ] . 华南理工大学学报(自然科学版) ,2004 ,32 (5) :88 - 91.
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)