
图3 转台驱动电机控制系统原理框图
4 系统设计
4.1 系统的硬件设计
该系统的硬件结构如图4所示。
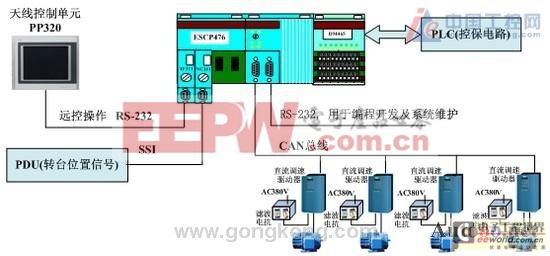
图4 系统硬件结构
本系统在硬件设计上,选用贝加莱的PCC为核心控制单元,通过CAN总线实现四台直流调速器及其直流电动机的组网,天线控制单元、控保单元、转台位置信号分别通过通信扩展接口构成完整的天线控制系统。
本系统中,PCC采用CAN总线网络控制直流电动机的运转,这不仅可以使电气接线大大简化,系统安装及维护工作大大减轻,且PCC可以以高速,高精度地对电动机进行控制,而且PCC对直流调速器实时状态信息监控更加具体全面,从目前业内高机动雷达及其它车载计算机控制系统和监控系统的发展现状来看,CAN总线的广泛应用已成为一个必然的技术趋势。
4.2 系统的应用软件设计
该多电机控制系统的应用软件基于PCC的开发平台Automation Studio集成软件平台设计,充分利用了标准化工业控制器PCC的软硬件优势:
(1) PCC的所有软件均采用模块化结构搭建,各个模块的功能既相对独立,又通过数据接口相互关联,既利于协同开发与维护,又便于项目的归档与标准化。各个任务模块相对独立的设计风格,可以有效地保证在系统器件或工艺要求变动时,对控制软件的影响都将是局部的、单一的。
(2) 该多电机控制系统应用软件采用面向对象的风格,由多层面多模块构建而成,电机的控制策略程序与底层数据采集和底层通信程序无关,有利于项目的局部改动调整与设备扩展,项目软件的代码可以获得最大程度的可重用性。
(3) 该多电机控制系统软件全部采用BASIC高级语言编制,软件具有很好的可读性与易维护性。
(4) 采用CAN总线对多台直流电机(驱动器)的控制,也是本系统软件设计的最突出特点之一,PCC可以通过CAN总线高速、高精度地对电机运动进行控制,实现对多台电机进行全面的信息采集与实时监控,包括每台电机的速度、方向、启停、使能、设定电流进行控制,并可监视电机的当前转速、方向、启停、使能状态、电机的电流及故障状态等信息。
4.3 应用软件的模块化结构
该系统的应用软件充分利用了BR 的Automation Studio集成软件平台的应用软件结构化与模块化设计的特点。按照系统硬件结构及工艺设计要求,整个系统的应用软件设计成多个相对独立的任务模块,各个模块之间按照严格定义的接口规范,相互传递信息。各个任务模块相对独立的设计风格,可以有效保证在系统器件或工艺要求改动时,对控制软件的影响都是局部的、集中而单一的。整个应用软件系统的结构如图5所示。
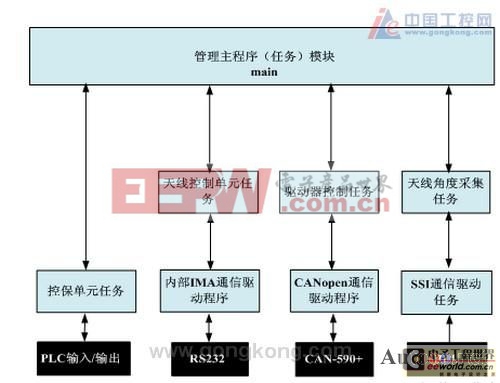
图5 应用软件系统的结构
4.3 容错设计
为了为保证整个天线控制系统各机械、电气部件的可靠运行,该系统对天线控制作了以下容错设计:
(1) 当某台直流调速器因某种原因触发报警时,该调速器所驱动的电动机是无法按照控制指令运动的,为避免意外情况发生,本系统做了安全性的保护措施——停止所有电动机的运动。并可通过显示的错误代码,直观地告知操作人员,进行意外情况的相应排错处理。
(2)当控保电路采集到限位信号的触发,多电动机控制系统的控制程序会保护性地将电机停止下来,以免转台触及机械限位部件,引起电机堵转。
5 结束语
基于CAN总线和PCC的全数字式多电机消隙天线控制系统,实现了天线转台的消隙以及方位、俯仰等控制功能。应用实践表明,该系统不仅能完成天线系统的精确定位,而且结构简单,数据通信流畅,可靠性高,电机驱动特性好。
参考文献
[1] 齐蓉, 肖维荣. 可编程计算机控制器技术. 北京:电子工业出版社,2005.
[2] 周力功. CAN基本知识.
|