电机控制的数字平台设计
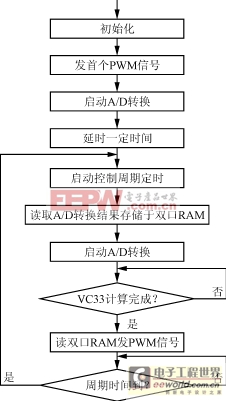
施可以避免这种情况的发生:如图4所示,将读/写的存储空间独立开来,显然LF2407A和VC33在写的时候就不可能产生冲突,避免了等待的发生。 图4 读/写存储空间分开 其次,冲突可能发生在一读一写同一存储单元的情况下。以LF2407A写数据,VC33读数据为例,上面分析的产生0.4μs等待时间的情况是基于如下假设:将8个数据依顺序存储于同一地址单元。即LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,此后LF2407A将第二个数据覆盖前一个数据存储,依次类推得出的结果就是8×50ns=400ns。事实是我们有足够的地址空间用来存储每批数据,将8个数据按顺序存放在不同的地址空间,此时的情况如下:LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,与此同时LF2407A也开始写第二个数据于下一个存储单元中。两者同时进行,我们只要保证VC33读完的时候,LF2407A第二个数据已经写完,则不会有冲突发生。针对本例,由于两者时间不同(LF2407A为50ns,VC33为13.3ns),VC33读得较快,只要在软件编写上增加40ns左右的循环,就能保证如上的要求。当读/写反过来的时候,则不存在这样的情况而能顺利配合。这样,最终的结果是只增加50ns的等待周期,对于本系统完全可以接受。 由于两个DSP并不同步工作,所以,LF2407A可以采样尽可能多的数据并保存,VC33只选用最新的数据用于计算,这样就能保证数据的冗余。程序流程如图5所示。 (a)LF2407A流程图 (b)VC33流程图 图5 利用双口RAM进行双机通信流程图 5 结语 双DSP控制系统综合利用了TMS320LF2407A和TMS320VC33芯片的优势和特长,两者在控制和计算上分工明确,并行工作。利用双口RAM实现数据和信息的交流的时候,针对电机控制系统采样数据相对较少的特点,从硬件和软件上相互配合,在解决存储空间争用的同时,很好地解决了等待时间等资源的浪费,也避免了数据交换时利用中断造成的软件不稳定。实现了两者之间的协调工作,大大缩短了控制周期,提高了控制平台的性能。对于低电感同步电机直接转矩控制时,由于控制周期过长而引起电流上升过大的问题能很好地加以解决,同时也使转矩脉动明显减小。 

- 基于TMS320F2812的DSP控制器设计及应用(04-15)
- 基于TMS320F240控制步进电机的调焦系统设计(10-20)
- j基于双DSP电机控制数字平台设计(02-15)
- DSP智能电机控制提高能量效率(02-09)
- DSP-LF2407A和CAN总线组成的分布式电机控制系统(02-29)
- 基于DSP芯片ADMC401的电机控制(06-02)