基于视觉处理的高级驾驶员辅助系统实现
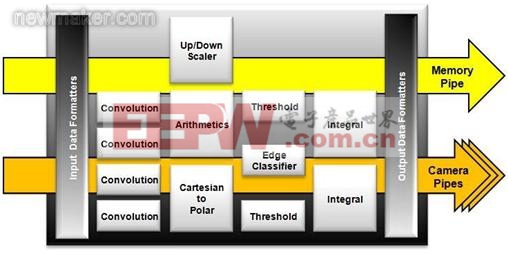
图1:采用ADSP-BF60x处理器的视觉处理
流水线视觉处理单元(PVP)近观
PVP可以处理多达四个数据流、三个摄像头数据流水线和一个存储器数据流水线,此外还可以计算直方图状态输出。如图2所示,PVP工具箱包括12个处理块,均针对各种视觉处理步骤进行了优化。
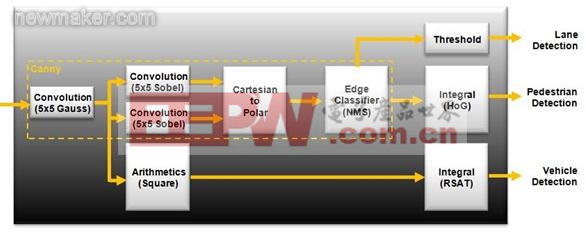
图2:流水线视觉处理单元(PVP) 通常而言,存储器数据流水线根据需求采用一个或多个处理块来分析一系列ROI,而且可能即时改变算子。摄像头数据流水线倾向于以并行方式处理全帧,输入数据可以多点传输至多个处理分支。用户可以十分灵活地互连算子而形成数据流水线。图3所示是一种可能的配置。
图中可以看到传统的Canny结构。这种结构包括一个具有高斯系数的低通滤波器、5×5矩阵的增强Sobel滤波器、笛卡尔坐标至极坐标的转换和一个非极大值抑制(NMS)级。剩下的最大值可能会通过一个阈值块传输来降低位分辨率,或对输出进行游程长度压缩,以实现最低的存储器加载。如果由软件(例如用霍夫变换算法)进行后处理,线路检测和车道保持辅助策略就可以通过这一边缘图像获得。
如果梯度转送至积分块(梯度直方图,HoG),行人检测所需的处理过程就已经完成了一半。低通像素的平方可能馈送到其他的积分块,积分块随后可以在正常模式(SAT)或对角线模式(RSAT)下运行。如果不需要高分辨率(例如在阴影检测的情况中),它可以降低输出的帧分辨率。
图中所示的示例配置显示了如何在单芯片中有效实施车道保持辅助以及行人和车辆检测,同时将Blackfin内核的MIPS负载保持在适当水平。未使用的MIPS和尚未使用的存储器数据流水线功能可以用来将前灯控制和/或交通标志检测集成在上方。所有这些功能都可以通过ADSP-BF60x器件实现,该器件在105℃环境温度下功耗不足1.3W,因此可以轻易安装在车内中央后视镜后方,靠近图像传感器。此外,ADI公司的ADAS视觉处理器还支持日间和夜间视觉系统,能够分析车辆周围的环境;并配备有驾驶员监控系统,可以检测驾驶员状态。
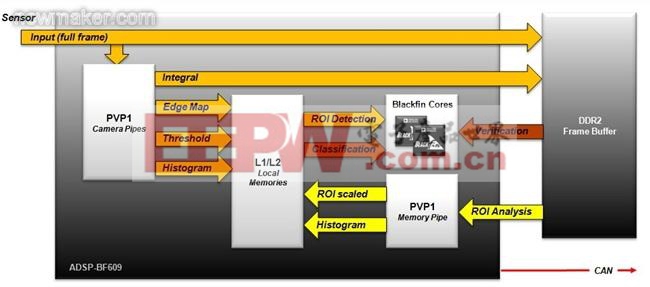
图3:物体和行人检测配置示例经济实惠的驾驶员辅助系统
ADI公司将视觉及雷达系统的ADAS列为开发重点。利用Blackfin BF609和BF608形式的全新专用ADAS视觉系统解决方案,ADAS视觉技术目前非常经济实惠,可以在各种级别的车辆中大规模采用。
- 汽车智能化,真伪需求调查结果出炉(12-14)
- 提高汽车安全性能的通过高级驾驶员辅助系统(03-27)
- 高级车内系统的参考设计(12-16)
- 高可靠芯片搭配视觉演算法,影像式ADAS满足车规要求(12-14)
- 简述在汽车中导入ADAS的三大设计方式(12-12)
- 如何优化工业DAQ系统设计(12-12)