汽车电子系统--未来展望
时间:11-20
来源:互联网
点击:
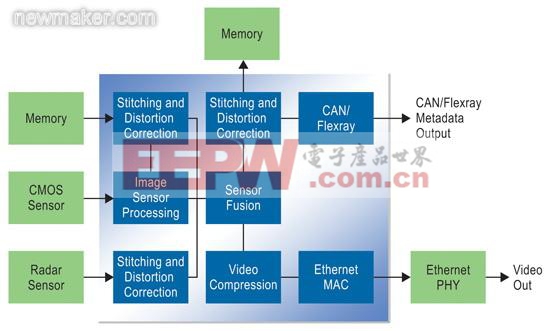
图2.传感器融合技术将大量的算法和网络终端集成在一个芯片中
随着车辆网络体系结构的发展,这一点显得非常重要。控制区域网(CAN)或者概率出现FlexRay网络等为特定目的而构建的控制网络的带宽虽然不一定能满足压缩后的HD视频带宽要求,但也能够限制抖动,确保正确的传送承载了传感器数据的数据包。原理上,系统设计人员能够计算最大抖动条件下所需的带宽,为系统提供足够的网络链路,以满足需求,即使这会导致为每一摄像机和雷达接收器提供专用的CAN。而在实际中,汽车生产商偏重于另一不同的发展方向:成本控制。
参加小组讨论的Broadcom公司产品市场资深总监Ali Abaye认为:“发展方向是车辆中布满了以太网。”Abaye评论说,随着传感器数量的增加,包括高端品牌在内对成本很敏感的生产商会尝试将所有各类控制、数据和多媒体网络合并到一个100 Mbits或者1 Gbit的双绞线以太网中。
但是,共享网络还是有延时问题。由于以太网会带来传输的不确定性,因此,需要某些同步协议——IEEE 1588、时间触发协议(TTP),或者音频视频桥接(AVB)等。Schirrmeister说,“这也是很积极的讨论。现有的协议还不足以满足这些系统的所有需求。”Abaye对此充满信心,他销售100 Mbit的收发器。他声明:“我们的观点是AVB协议已经足够了。”
这些争论会导致系统需求不仅仅是电缆成本问题。千兆以太网意味着需要采用高级工艺节点的硅片,成本、可用性以及软误码率等都会带来问题。同步协议并不是小型协议,需要功能更强大的网络适配器。这需要对来自很多传感器的时间戳数据进行存储,甚至是对帧进行重新排序,有可能影响存储器布局。
多体问题
最后一点,当您把雷达或者扫描激光器放入到ADAS体系结构中时,会带来难以处理的问题。附近车辆的ADAS彼此之间会相互影响。这导致传感器干扰,出现不稳定的多车系统,两辆车的避险系统会互相干扰。这不是一个简单的问题:在同一条车流中的多台车使用避险算法时,将出现不可避免的撞车。
Schirrmeister说:“已经在多ADAS系统行为方面展开了一些研究。这将是非常令人感兴趣的一个领域。”
这类问题在一定程度上肯定要涉及到北美和欧盟的ADAS算法管理机构。Schirrmeister预计,在发展中国家,其城市还在不断扩张,建设全新的基础设施,随着智能高速公路的发展,会向协调ADAS方向演进。
在任何情况下,很明显,对这些系统进行验证会涉及到全系统,甚至是多系统的建模问题。这将是很艰巨的任务,远远超出了军事航空航天领域之外大部分系统设计团队的经验。
我们跟踪了一个汽车系统的发展,ADAS,从一组隔离控制环到中心传感器融合系统。车辆中的其他系统也会遵循相同的发展路径。那么,系统会开始融合:例如,ADAS与引擎控制和牵引系统一起工作,不需要驾驶员的干预,就能够妥善的解决车辆遇到的问题。最终是能够自治的车辆,它具有复杂的智能控制系统网络,这一网络的核心是以周围环境为中心的模型。
- 极近场EMI扫描技术在汽车电子系统中的应用(03-03)
- 汽车电子系统使用自保护MOSFET需考虑的因素(01-04)
- 光子学技术在汽车电子系统中的应用(11-14)
- 5个汽车电子系统LED驱动的应用案例(07-20)
- 汽车电子系统元器件解决方案(06-18)
- 高级车内系统的参考设计(12-16)