汽车电子智能安全系统的简单叙述
时间:12-03
来源:互联网
点击:

OOP的概念:即out of position,是指驾驶员在驾驶时偏离正确的坐姿而靠近方向盘的情况。本方案中多次用到这一概念,故在此强调说明。
当汽车速度急速下降时,若加速度大于中断阀值(即使得单片机进入中断服务程序的加速度),则向MCU发出外部中断,MCU将加速度传感器得到的模拟量A/D转化后判断该加速度是否超过安全气囊的开启阀值。若已超过,则将各传感器得到的参数转变为查表地址(详细的阐述见第四部分软件描述),进而查表得到气囊参数受传感器参数。
3.2.3 加速度传感器 MMA1200D (MOTOROLA)
选择MMA1200D 的理由是:
⑴ 大测量范围+-250g,适用于由于碰撞造成的加速度测量。
⑵ 随时可以自检,提高系统可靠性。
⑶ 提供状态输出,实现自动错误检测。
3.3 数字量采集模块
这里的数字量主要是两个开关信号:
安全带信号=>系了安全带时为低点平;未系时为高电平。
3.4 硬件在环仿真系统

同时在连接的PC上开发了一套模拟演示系统。PC上的演示程序向系统发出碰撞时候的加速度数据以及模拟判断是否系上安全带的数据。系统将处理结果向CAN总线发送的同时向串口发送,并在演示程序的界面上实时的显示出来。同时由传感器测量的数据也通过串口向PC发送并动态地显示。
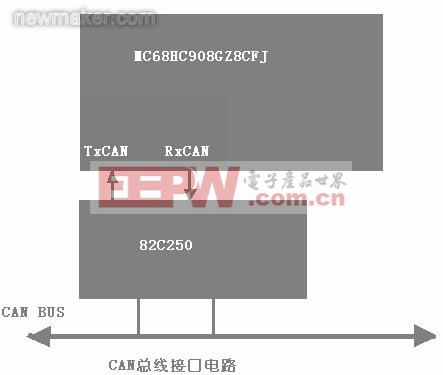
3.5 CAN 接口设计
CAN 总线接口电路如图所示:68HC908GZ16 单片机有CAN 控制器,由82C250 组成CAN 总线系统,CAN 编程需要考虑的问题有CAN 协议、CAN 速率、CAN 中断等。实现了CAN 协议的调试功能。
4.1 系统输出控制信号的延迟时间控制
安全气囊的控制要求有极高的实时性,一般情况下系统要在毫秒级的时间内输出控制信号。对于本系统而控制信号的输出延迟为:
输出延迟时间=硬件延迟时间+MCU 处理时间。
本系统硬件延迟时间主要有A/D转换的时间决定,而MCU自带的A/D转换时间略为17微秒。所以影响输出延迟的主要因素是MCU处理时间。
本系统的输出控制信号为气囊的控制信号和安全带预收紧的信号。气囊的控制信号采取查表法来得到。输入信号决定表的地址,表的内容为输出信号。查表时间为一个指令周期。
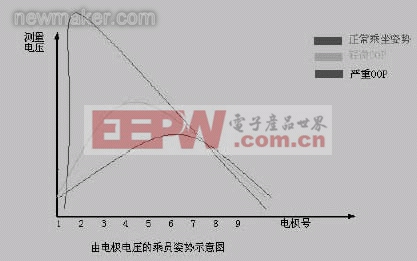
安全带预收紧信号通过电传感器的9 个电极测得电压值构成的电压曲线与人在正确坐姿情况下得电压曲线相比较,得到OOP 的程度。由OOP 的程度决定安全带预收紧的程度。
查表所需时间为一个指令周期。测量比较OOP 程度所需时间在微秒级。这样,整个系统的控制信号输出延迟(微秒级)远远小于现行规定的汽车碰撞后气囊打开时间(为毫秒级)。所以方案是切实可行的。
4.2 查表法的映射关系
4.2.1 决定查表地址的输入信号
⑴经过A/D转换的压强参数。
⑵经过A/D转换的汽车加速度参数
⑶是否系上安全带信号

1.压强参数:
因为由传感器测得的压强参数和人的体重成正比,我们先阐述人体重和查表地址之间的关系,然后体重乘以一个比例系数就可得到压强和查表地址。这里采用线性量化方法以十公斤为间隔将人按体重分为16 种。
2.汽车加速度参数:
量化范围为0—160g,通过线性量化为16 个值
3.安全带系上与否的信号:
系了安全带时为低点平0;未系时为高电平1。
4.3 软件流程图

主程序负责对系统初始化、检验电源电压是否正常,并在人坐上座位时通过读取压力传感器的得到人的体型参数用以设定cpu工作速度。在汽车运行时通过查询循环不断读取新的电场成像器件输出的参数。
因为系统对碰撞时刻加速度读取的实时性要求很高,故采用外部中断的方式控制。当汽车发生碰撞时,加速度传感器将输出与中断阀值电压进行比较,并在输出大与中断阀值时激活外部中断。接下来的流程就如外部中断流程图所示。
5.系统的低功耗设计和可靠性设计
5.1低功耗设计
本方案所选MCU具有高速模式和低速模式两种。在汽车内无人时,芯片处于低速运行状态,功耗低。当有人进入车内坐在座位时,压强传感器将产生信号传给MCU,使单片机由待机状态转化为高速工作状态。
5.2可靠性设计
本方案所选MCU具有系统操作正常监视模块COP,即看门狗,其功能是在MCU工作不正常时,产生一个复位信号。防止单片机在不断查询乘员位置∕姿势参数时,陷入死循环状态。
6.参考资料
1《智能汽车乘员约束系统的开发方法》,张君媛,公路交通科技
2《汽车智能乘员约束系统效能的仿真研究》,张君媛 林逸华 伟张歌,设计·计算·研究
3 《Air Bag Crash Investigations》,John C. Kindelberger,NHTSA
4 《Assessment of Advanced Air Bag Technology and Less Aggressive Air Bag Designs Through Performance Testing》,Glen C. Rains Federal Office of Road Safety ,Australia Paper ,Number: 9%SS-O-06
5 Libratory Test Procedure For FMVSS 201 Rigid Pole Side Impact Test(end)
- DSP和FPGA在汽车电子中的广泛应用 (04-08)
- μC/OS-II实时操作系统在混合动力整车控制器中的应用(05-22)
- 汽车电子中的DSP和FPGA应用概况(04-28)
- 采用可靠的汽车电子设备保护方法(12-20)
- 汽车电子稳定系统(ESP)详解(12-20)
- 基于单片机设计的的客车轻便换档系统(12-20)