基于CAN总线嵌入式数字控制系统的设计
时间:12-07
来源:互联网
点击:
个字节是传输数据。CAN总线每次只发送一种运行参数,其中给定速度、反馈速度、反馈电路及电枢电压依次轮流发送。而故障状态在程序中设置为优先级最高,当有故障出现时则优先发送,正常状态下不发送。图2是整个系统的数据传输流程图。
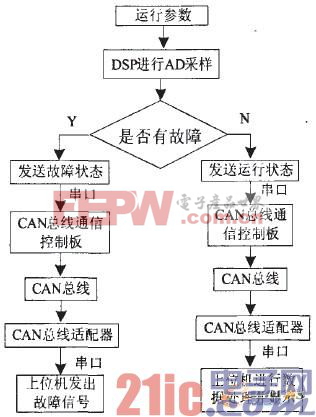
图2 数据传输流程图
3 实验
图3为上位机数据显示界面,图中显示为调试某一时刻的传输数据。可以看出反馈速度与给定速度并不相等,由于PI控制算法的作用使反馈速度始终处于给定速度附近。反馈电流1.2A是在电机空载时的测量值,随着负载的增加,反馈电流会逐渐增大。电枢电压是直流电机母线上的电压,由于电机在实际应用中主要工作在220V,所以调试时首先将电枢电压稳定在这一电压值,然后再对速度进行调节。在正常情况下,故障状态始终显示为“无”,当有故障信号发出时,故障状态显示为“有”并发出报警信号。

图3 上位机数据显示界面
这样上位机就收到某台电机此时的各种运行参数,由此可以实现使用上位机监控整个厂房中所有电机的运行状况。
在系统调试时,使用三米长的双绞线作为通信介质,上位机、直流电机、直流电机调速器等作为调试工具。实验证明,上位机能够顺利接受到直流电机发送的各种运行参数,说明系统已经实现了数据通信的要求。由于直流电机。测速机本身都是比较大的干扰源,在此情况下数据仍能顺利传输,这也一定程度上验证了CAN总线的抗干扰能力。
4 结束语
本文针对CAN总线在直流电机调速器与CAN总线控制器之间的数据交换以及CAN总线与上位机间的数据传输,最终实现CAN总线对直流电机的运行状态的监视。
控制系统 设计 数字 嵌入式 CAN 总线 基于 相关文章:
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于DSP的新型弹载控制计算机(04-05)
- 基于TMS320VC5509A的语音识别与控制系统(06-17)
- 基于DSP的智能刹车控制系统研究(07-29)
- 基于DSP的逆变电源控制系统设计(08-11)
- 基于DSP的混合悬浮控制系统的硬件设计(01-13)