基于AVR单片机帆板控制系统的设计
时间:12-12
来源:互联网
点击:
断:是否完成了50次角度数据采集; (5)生成偏差量:实测帆板转角与预置参数运算,生成待调节的偏差量。 图8 角度检测单元主程序流程框图 控制单元 控制单元主程序流程,主要包括初始化、起动按键判断与处理、停止按键判断与处理、报警判断与处理和设置参数判断与处理等。 (1)初始化:主要包括引脚配置初始化、相关参数初始化等; (2)起动按键判断与处理:按键有效,执行电机起动子程序(主要工作:读出EEPROM中预置参数,由PWM信号控制电机驱动器输出,并累计控制过程的用时); (3)停止按键判断与处理:按键有效,执行电机停止子程序(主要工作:停止电机驱动器输出,并清零累计控制过程的时间); (4)报警判断与处理:帆板转到预置参数时,执行声光报警子程序(主要工作:声光报警,停止累计控制过程的用时); (5)设置参数判断与处理:按键有效,执行参数设定子程序(主要工作:实现帆板转动的预置参数设定,并存储保留参数值)。 测试方案与测试结果 1.测试仪器:量角器、刻度尺、示波器、温度计、数字万用表。 2.测试结果分析:经反复测试,要达到分辨力为1°、绝对误差≤3°、调整时间小于3秒、距离d在5cm~18cm 范围可变、旋转角度在0~20°之间变化时,电机供电电压应为9V;当风帆转角在21°~70°之间变化时,电机供电电压应为20V。对应的PWM数据如表1所示。 表1 PWM数据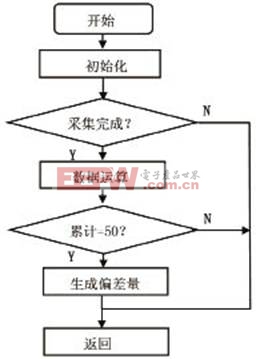

- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于DSP的新型弹载控制计算机(04-05)
- 基于TMS320VC5509A的语音识别与控制系统(06-17)
- 基于DSP的智能刹车控制系统研究(07-29)
- 基于DSP的逆变电源控制系统设计(08-11)
- 基于DSP的混合悬浮控制系统的硬件设计(01-13)