基于AVRMEG16的多功能航空电子钟设计
摘要:以AVRMEG16作为核心控制器,时钟芯片DS3232提供参考时钟,并通过429总线接收GPS授时信号给系统贴上精确的时钟标签,设计制作了多功能航空电子钟系统。该系统实现了用数显、指针显及混显三种模式高精度显示现时时间、航行时间或测时时间。
关键词:AVRMEG16;ARINC 429总线;GPS授时;TFT-LCD模块
在民用或军用飞机中,都需要精确显示现时时间、航时时间和测时时间,以保证飞机的正常运行。本文用低功耗单片机AVRMEG16控制3.5英寸320×240分辨率、彩色TFT-LCD,设计了一款实用性很强的多功能航空电子钟。
1 总体设计
1.1 总体设计框图
采用AVRMEG16作为核心控制器,显示部分选择北京信利TFT-G240320LTSW-118w的LCD模块。总体设计框图如图1所示。

航空电子钟主要由显示面板、控制按扭、腔体、接口等部分组成。最大外形尺寸为63 mm×63 mm×150 mm。鉴于体积小的特点,在设计时,采用积木型电路,把控制电路、显示电路和授时电路三块电路板叠加起来。
1.2 系统功能分析
电子式航空时钟的计时功能是在同一屏显示器中,同时动态显示现时计时时间、航时计时时间和测时计时时间三模式。
这三种显示模式应能在功能控制按钮控制下切换,每次开机显示模式为模式1(混显式),三种显示模式时间应同步。
(1)模式1(混显):现时计时、航时计时为数字显示。测时计时为指针显示(见图2)。

(2)模式2(指针):现时计时、航时计时和测时计时均为指针式显示(见图3)。

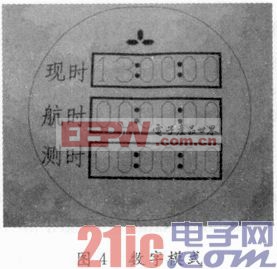
(3)模式3(数字):现时计时、航时计时和测时计时均为数字式显示(见图4)。
以AVRMEG16作为核心控制器,时钟芯片DS3232提供参考时钟,用ARINC 429总线接收GPS或北斗星授时信号,并通过LCD控制器控制显示模块TFT-LCD。
2.1 电源电路设计
AVRMEG16单片机和时钟芯片都需要稳定的5 V电压,可采用集成稳压电路,很容易得到5 V;TFT-LCD需要19 V的背光电源,采用DC-DC升压芯片MC33063产生19 V电压。MC33063作为比较常用的背光升压芯片,输入电压为3.0~40 V,输出1.25~40 V可调,最大输出电流1.5 A,具有关断功能并有温度自动补偿功能,仅用少量的外围元件就可以实现升压功能,设计原理电路如图5所示。
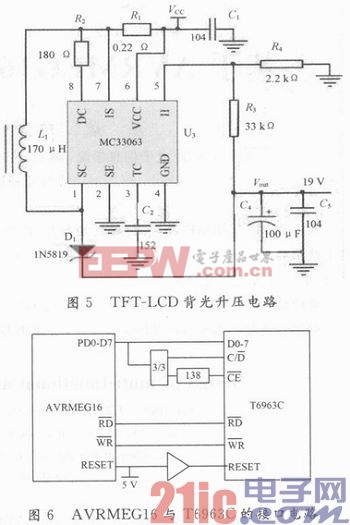
MC33063的输出电压完全取决于R3和R4两个电阻的比值,计算公式如下:
2.2 TFT-LCD接口电路设计
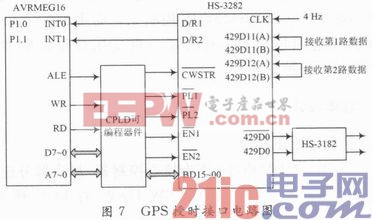
LCD模块与单片机的接口就是LCD控制器面向单片机的引脚,LCD控制器选用的是TOSHIBA公司出品的T6963C,T6963C具备汉字显示和图形显示功能。其接口电路如图6所示。
2.3 GPS或北斗星授时信号的接收电路
GPS接收模块通过基于HS3282的ARINC 429总线通信卡实现数据传输,从而实现单片机读取时钟信号。
HS-3282与单片机、可编程逻辑器件的硬件连接电路如图7所示。
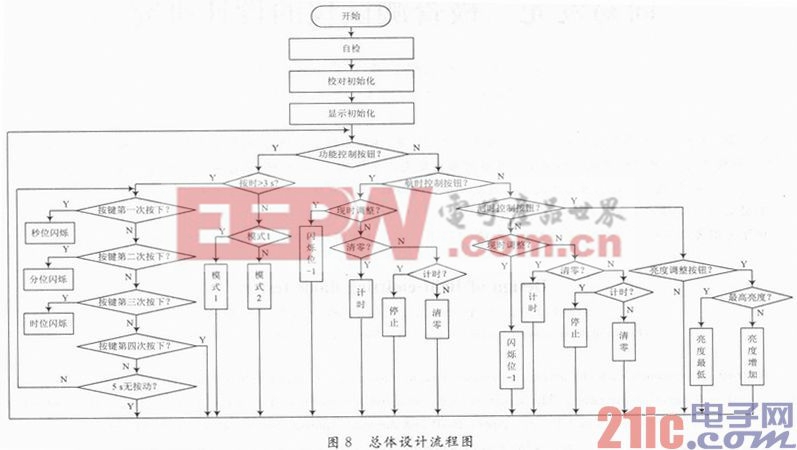
采用Keil C51编写,用AVR JATG进行在线仿真。总体控制流程图如图8所示。
3.1 TFT-LCD显示子程序设计
对于每个汉字的显示,首先应该计算该汉字在字库中的地址,然后读出该汉字的字型码。当显示至一行的末尾时要换行显示。显示汉字时,一个16×16的汉字字型码占32 B,每显示一行要2 B;第二行显示时,显示地址要在前一行首字节地址上加30,共需要16次循环才能完整地显示一个汉字。在处理汉字显示时,如果要实现汉字的反显(例如实现菜单操作),将汉字的32 B字模数据分别与0xFF异或(XRL)运算,或者取反(CPL)运算后再显示即可。
3.2 按键功能子程序设计
电子钟的控制按键包括功能控制按钮、航时调整按钮、测试调整按钮和亮度调整按钮、这里着重介绍亮度调整按钮的特点,点按(时间小于2 s)此按钮为白天及夜间两种亮度转换,长按(时间大于3 s)此按钮亮度从最暗到最亮连续循环可调。开机时屏显亮度为上次关机时亮度(亮度具有断电记忆功能)。
3.3 GPS或北斗星授时模块子程序设计
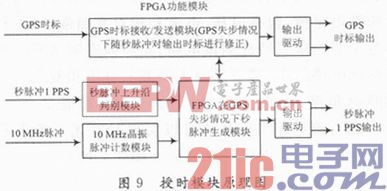
软件编写主要是在CPLD上完成,应用VHDL语言对各个软件模块进行功能开发。把FPGA实现GPS失步情况下精确授时的软件功能分成4个功能模块,4个模块共同作用完成了时钟的精确授时,如图9所示。
设计制作的2个多功能航空电子钟样机,能够用数显、指针显及混显三种模式高精度显示现时时间、航行时间或测试时间,还可采用GPS或北斗星授时,显示亮度可多级调整,适于全天候观测。经过长时间考核2台样机运行,其性能稳定,在-20~+40℃范围内,精度为±2.0 ppm,相当于每年误差±1.0 min。
AVRMEG16 ARINC 429总线 GPS授时 TFT-LCD模块 相关文章:
- 基于μC/OS-Ⅱ的1553B和ARINC429总线实时协议转换系统的设计(08-09)
- 基于NIOSII的ARINC429总线接口板设计(12-13)
- 基于NIOSII的ARINC429总线接口板研究(12-13)
- 一种智能ARI NC429总线接口板的硬件设计与实现(12-20)
- 基于80C196KC的ARINC429总线接口板设计(10-24)
- S698-T处理器的VxWorksARINC 429总线模块应用(09-12)