手术动力装置微电机的测功机的研究
摘要:手术动力装置是临床的重要器械,它的电机的性能直接关系到病患的生命,所以对手术动力装置微电机的测功机的研究就显得尤为重要。基于windows平台,以STC单片机为数据采集系统,配合必要的传感器和驱动电路及信号调理电路,应用模糊控制PID算法,开发手术动力装置微型电机的测功机主控系统。该系统完成了数据采集、处理、显示和报警等功能。
关键词:测功机;单片机;模糊控制;手术动力装置
随着我国临床医学的发展,手术动力装置成为临床手术中重要的器械之一。一般要求手术动力装置需具有尺寸小,转矩脉动小,转速精确可调等优点。手术动力装置所选用电机与动力设备匹配之前,都需经过测功机进行动力测试,因手术动力装置的微型电机要求转速高而转矩精确等特点,市场上没有适合手术动力装置微型电机的测功机,所以对手术动力装置微型电机的测功机研究就显得尤为重要。
手术动力装置微电机的测功机由被测电机、加载器、多种传感器、单片机、上位机及驱动电路等组成。其中,加载器是一台他励直流电机;被测电机与加载器用联轴器相连;数据采集采用STC12C5A60S2单片机,它采集被测电机和加载器的信号,并传递给计算机,并接受计算机处理之后信号用以驱动被测电机和加载器;上位机应用程序完成启动、停止整个系统、处理和传递参数给单片机,以及模糊控制PID算法的运行。模糊PID控制算法克服了模糊控制精度不高和存在静态余差的缺点,达到良好的控制效果。
1 手术动力装置微电机的测功机的硬件设计
整个系统硬件结构如图1所示,系统主要包括STC12C5A60S2单片机最小系统、电子负载加载电路、电机驱动电路、倍频电路、放大电路、电压处理电路和串口通信电路等。

1.1 电子负载加载电路
为了实现自动测试采用自动加载模块,它主要给被测电机自动加负载,具体采用电枢外接电阻的自动调节模块。此时励磁磁场不变,改变电枢外接电阻来调节电枢电流,从而达到改变电机负载转矩的目的。为了实现自动调节,负载使崩电子可调电阻,采用PWM控制。
1.2 转矩转速测量
转矩测量采用定子转矩法,即把电机的定子和转子同时架空,电机旋转时,电磁力对转子产生一个旋转的力矩,同时也向定子施加一个大小相等,且方向相反的反作用力矩。通过力传感器测得定子的受力,就能计算出转子所受到的力矩了。根据测试电机的力矩范围,这里选取6 kg的力传感器,并用集成运放AD620对其输出信号进行放大。
转速测量采用的是WTK-10凹槽型光电传感器,传感器的相关电路在内部,直接开关量输出,检测频率为1 kHz,测速采用6缝隙测速码盘。
1.3 无刷电机驱动电路
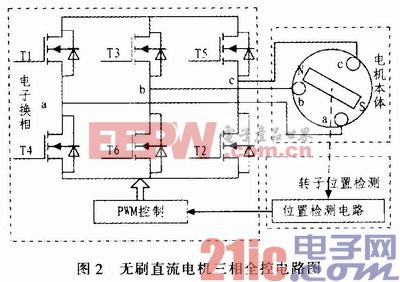
其中被测无刷直流电机型号是portescap生产的B0610-024A-R00电机,此电机转子的材料为永磁磁钢,电枢绕组放置在定子上。通过永磁磁场和电枢磁场之间的作用,从而产生连续的转矩来保证电机的连续工作。其中永磁磁场由转子磁钢定子产生,电枢磁场由定子绕组产生。电机的电子换相部分采用绕组导通120°电角度、三相桥式控制方式,电机本体的定子采用星型连接方式的系统比较合适。电路图如图2所示。
1.4 其他电路
多路开关采用CD4051,电压处理电路采用AD620运算放大器对信号进行处理。
2 手术动力装置微电机的测功机的软件设计
系统的设计目的要求不仅是对外界参数进行实时测量,在一定时间内完成对数据的采集和处理,而且还必须对相应的转速、转矩、电压、电流、功率等进行实时控制。系统的主要任务有4个:通过串口进行数据通信任务、发送加载器及电机驱动任务、数据采集任务、数据分析显示。测功机系统的软件设计包括两部分,上位机应用程序设计和单片机软件设计。
2.1 上位机软件设计
上位机主要任务是:串口通信、数据分析显示和发送任务。上位机利用Visual C++6.0作为开发工具,实现与单片机的通信,通信采用MFC的MSComm控件。上位机可以提供如下功能:被测电机参数设置(转矩和转速)、参数实时监测(其中包括转速、转矩、电流、功率等参数)和控制策略的实现。具体的流程框图如图3(a)所示。
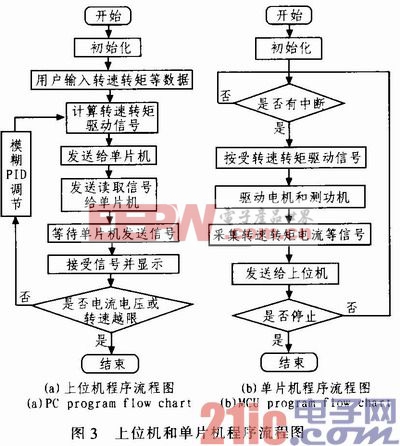
2.2 单片机软件设计
单片机信息采集控制系统是一个多输入多输出的测控系统,主要任务有:数据采集任务、串口通信任务和发送电流加载任务,实时性要求较高。由于单片机内存资源有限,应尽量减少任务个数,即减少任务堆栈个数将相近的功能整合到一个任务中;同时中断有关的任务要注意保护,避免反复响应和进入中断,导致系统负荷过大,实时性受影响;还应把计算量较大的任务给上位机来运行,保证实时性和稳定性。
具体的流程框图如图3(b)所示。
2.3 模糊PID控制器的设计
目前,工业过程中广泛采用PID控制,不同的对象要用不同的PID参数,而且调整不方便,抗干扰能力差,超调量大。因此采用模糊控制系统对模型进行控制。
模糊PID控制器是模糊控制器与传统PID控制器的结合,它的设计思想是:先找出PID参数与期望值与实际输出的偏差E和偏差变化EC之间的模糊关系,在运行中通过不断检测E和EC,再根据模糊控制原理对3个参数进行在线整定,传统PID控制器在获得新的Kp,Ki,Kd后,对控制对象输出控制量。模糊PID控制器原理图如图4所示。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)