Matlab GUI的上位机与智能车的两种实时通信
时间:01-07
来源:互联网
点击:
图5为以下方式实现的智能车启动过程速度的实时显示,修改后的instrcallback.m文件主要程序代码如下: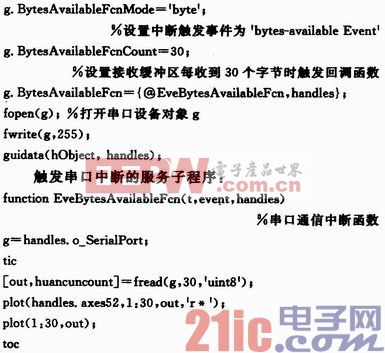
6.2 通过调用修改后的instroallback.m文件实现中断
主程序:
修改instreallback(obj,evenlt)回调函数,instrcallback.m文件包含了Matlab提供的回调函数程序模板,设计者可以根据需要自行添加相应的服务程序代码。Matlab安装目录下有两个instrcallback.m文件,只需要修改\MATLAB\toolbox\matlab\iofun\@instrument目录下的instrcallback.m文件即可。另外,在修改instrcallback.m文件之前,最好对其做一个备份。在修改了instrcallback(obj,event)回调函数后,需要对其进行保存,重新启动Matlab配置该文件,才使修改后的函数生效。

实验证明,基于Matlab事件驱动实现的智能车与上位机的实时串口通信可以很好地满足智能车调试过程中的需要,且将中断服务子程序写入GUI组件和修改instrcallback.m文件两种方式的通信都稳定可靠。
结语
在Matlab环境下两种实现智能车与PC机实时通信的中断机制都能实时稳定地进行数据传输,不过将中断服务子程序写入GUI组件的方式编程简单,数据处理方便,实现更为容易,开发效率相对得到了较大的提高。实践证明,采用这种方法是可行的,它不但能够应用于本文的智能车系统,也可广泛应用在其他具有串口通信能力的仪器设备中。
Matlab GUI 智能车 MC68HCS12G128单片机 回调函数instrcallback 实时通信 相关文章:
- 基于DSP和MATLAB的语音数据采集和处理系统(05-13)
- 简化“算法到C代码”是软件业的一项挑战(07-04)
- DSP与MATLAB的语音数据采集和处理系统(02-12)
- 基于MATLAB-DSP在无传感器矢量控制中的应用(05-04)
- 基于Matlab和VC混合编程的DSP数据采集系统(05-06)
- 基于FPGA设计DSP的实践与改进设计(05-11)