AVR单片机TC0快速PWM
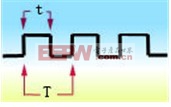
PWM:脉冲宽度调制,图中T为脉冲周期,t为高电平时间,t与T的比值t/T称为占空比,脉宽调制指的是调整t的大小,即改变脉冲的占空比,占空比值越大,输出的电压越高。改变占空比就改变输出的电压,常用于实现D/A,调节电压或电流,改变电动机的转速等。
快速PWM模式:它的计数方式是TCNT0由0开始计数到255式,计数加1返回到0,然后继续加1计数,相对于相位PWM修正模式(由0计数到255,再从255计数到0),只有一个斜坡,因此PWM输出频率高。在快速PWM模式下,计数器的最大值决定了PWM的频率,而比较寄存器OCR0决定了占空比的大小。T/C0是8位计数器, 输出PWM的频率=系统时钟频率/(分频系数*255) 。
PWM产生过程:定时器启动后,当TNCT0和OCR0的值相等时,输出引脚OC0(PB3)清0,当TNCT0到255时OC0置位,在程序运行过程中改变OCR0中的数值,就改变了OC0输出的占空比。
//函数功能:控制PB3引脚上的发光二极管由亮到灭,再由灭到亮 (代码来自轻松玩转AVR单片机c语言cd)
#include
#define uchar unsigned char
#define uint unsigned int
unsigned int count;
/*********以下是延时函数*********/
void Delay_ms(uint xms)
{
int i,j;
for(i=0;i
{ for(j=0;j1140;j++) ; }
}
/********以下是端口初始化函数********/
void port_init()
{
DDRB|=(1
PORTB=(0
}
/********定时器0初始化********/
void timer0_init()
{
TCCR0=(1
// T/C0工作于快速PWM模式,不分频
//比较匹配时,OC0置位,记数到0XFF时,清零OC0
OCR0=0; //比较匹配寄存器初值,
SREG=0x80; //使能全局中断
}
/*********以下是主函数*********/
void main(void)
{
port_init();
timer0_init();
while(1)
{
for(count=0;count256;count++) //OCR=0时,LED最亮,然后逐渐变暗
{
OCR0=count; //比较匹配寄存器赋值
Delay_ms(20); //延时一段时间,以观察效果
}
Delay_ms(3000); // LED最暗时,延时一段时间
for(count=255;count>0;count--) //OCR=255时,LED最暗,然后逐渐变亮
{
OCR0= count;
Delay_ms(20);
}
Delay_ms(3000); //LED最亮时,延时一段时间
}
}
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 基于AVR单片机的服装压力检测系统设计(05-03)
- 基于Atmel AVR单片机的无线图像侦检系统(10-19)
- avr单片机串口多机通讯及实例(12-03)
- AVR单片机入门系列(25)AVR PWM OC0(12-03)