基于单片机的LED显示屏控制系统设计
1、led显示数据组织
需要显示的区域小于或等于实际显示区域时,采用静态显示即可。但大多时候需要显示的区域大于或等于实际显示区域,如图1所示。为了简化问题的分析,本文将显示区域高度设置为LED显示屏高度的4倍,宽度等于LED显示屏宽度。设显示屏的高度为Lh,宽度为Lw,则显示区域高度Dh=4Lh,宽度Dw=Lw。本文以单色显示作为描述对象,且Bw=Bn=8(Bw为扫描线条数,Bn为输出数据宽度),如图1所示。
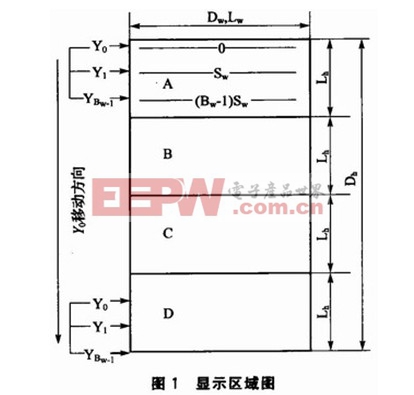
对于一个LED显示屏,宽度Lw和高度Lh确定后,显示屏单元板的排列方式也就确定了。单元板相邻的两条扫描线之间的距离为Sw,显示屏有Bw条扫描线,分别是Y0,Y1,…,YBw-1。每Sw行对应一位显示数据,显示屏上的每一个点对应于存储器中某个字节的某一位。Bw条扫描线分别指向:Y0=O,Y1=Sw,…,BBw-1=(Bw-1)Sw。用静态显示数据组织方法分别对显示块A、B、C、D组织显示数据。首先对显示块A的显示信息进行组织(X为列号):
①X=0,即当前扫描线各行与第O列相交各点的显示数据按D0,D1,…,DBw-1的顺序存储在存储器的第一个存储单元中。
②X值增加1,当前扫描线各行与X值对应列相交各点的显示数据存储在存储器的下一个存储单元中。直至将X=O至X=Dw-1的Dw个数据按顺序全部存储在存储器中。
③Bw条扫描线向下移动一行,重复第①至②步,直到Y0移动到Sw-1行时。
④数据组织结束。
显示区域B、C、D分别按照A的数据组织方式去组织显示数据。组织后的显示数据块按A、B、C、D的顺序存储在RAM0里,然后将RAM0中的显示数据块A、B、C、D按B、C、D、A的顺序拷贝到RAMl中,任何两个相邻显示块的显示数据在两块RAM中都有相同的地址存储区域。RAM0和RAMl的显示数据与存储器的对应关系如图2所示。
扫描组1从Y0=0到Y0=Sw-1,对应显示块A,数据已组织存放在存储器中,可以直接输出显示数据;扫描组2从Y0=Lh到Y0=Lh+ Sw-1,对应显示块B也已经组织好,可以直接输出。但是扫描组3,它的位置非同一般,它的扫描线分别对应着两个块A和B;第O,1,…Bw-1条扫描线分别对应显示块A扫描组1的1,2,…,Bw-2;而第Bw-1条扫描线就对应显示块B扫描组2的第O条扫描线。如果要在显示屏上显示扫描组3对应的这一屏数据,就一定要同时使用到扫描组1的第1,2,…,Bw-1条扫描线和扫描组2的第O条扫描线组织的显示数据作为输出数据。由于显示块A和B的显示数据是分别组织的,这时就要取RAM0的D0,D2,…,DBw-1和RAMl的D0位作为输出到显示屏的Bw位数据,这就需要在两块RAM同时输出的2Bw位中选择需要的Bw位
作为输出数据,并且这Bw位数据是连续的。

显示步骤(在此只考虑垂直移动显示效果);双RAM技术将显示数据输出的时候,是将两块RAM中相同地址的两个数据同时输出。所以,如果设置RAMO为主存储器,RAMl为从存储器,则将两块RAM的显示数据存在一块串行存储器中时,偶地址单元应存储RAM0的数据,奇地址单元存储RAMl的数据,由于数据宽度为8,所以每次输出16位数据。如果显示区域中以(XL,YL)点为显示起始点,在LED屏上显示一屏显示信息,则其数据选择控制位只与YL、扫描线和扫描宽度Sw有关。显示区域的起始行坐标为YL,一块显示区域有Bwmiddot;Sw行,则YL所在的块为:

这里讨论YL在实际显示区域的坐标没有多大意义,只须注意YL在当前显示块的相对坐标,NL=YL%(Bw·Sw)就是YL在当前显示块的相对纵坐标,则相对坐标为(NL,YL)。动态显示的基础是静态显示,静态显示以从特定行显示一屏为特征,当显示屏从第YL行开始显示信息时,因为一块显示区域有Sw·Dw个数据,则YL所在块显示数据的起始地址为:

一块显示区域分为Sw个区,则YL所在的分区记作:

一区存放有Dw个显示数据,所以YL所在分区地址与所在块起始地址之间的相对偏移地址为(YL%Sw)·Dw。所以,只要知道了显示信息的起始行坐标,就能得到显示数据在存储器中的存储地址。
NL=YL/(Bw·Sw),这里记i=NL/Sw(0≤i≤7),表示显示信息跨越两个数据块时需要选择的数据位数。存储器输出16位数据[D0,D1,…,D15]后,从Di位控制选择连续的8位数据[Di,Di+1,…,D7,…,D7+i]输出到显示屏。当数据从一个字节的Di位开始输出16位时,如[Di,Di+1,…,D7,…,D15,D0,…,Di-1],前面8位在当前显示是多余的几位数据,后面8位数据[D8+i,…,D15,D0,…,Di-1]正好是要输出到显示屏的8位数据。当这1
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)